TP VARIATION DE VITESSE (ALIMENTATION SINUSOÏDALE)
Etude
de la chaîne d'énergie du malaxeur -
Activités des modélisateurs

Le moteur asynchrone est un moteur dont l'alimentation est triphasée.
Il est donc nécessaire d'alimenter ce moteur avec une tension caractérisée
par une fréquence et une tension efficace bien particulières.
L'ambition de cette partie est :
* de vous faire étudier la génération de la tension délivrée aux
bornes du moteur
* de vous faire étudier le couplage entre le convertisseur
statique et le moteur asynchrone.
* et enfin de vous faire étudier l'ensemble de la chaîne
d'énergie, jusqu'à la partie opérative
Etude de l'onduleur seul
Un onduleur se représente comme suit :
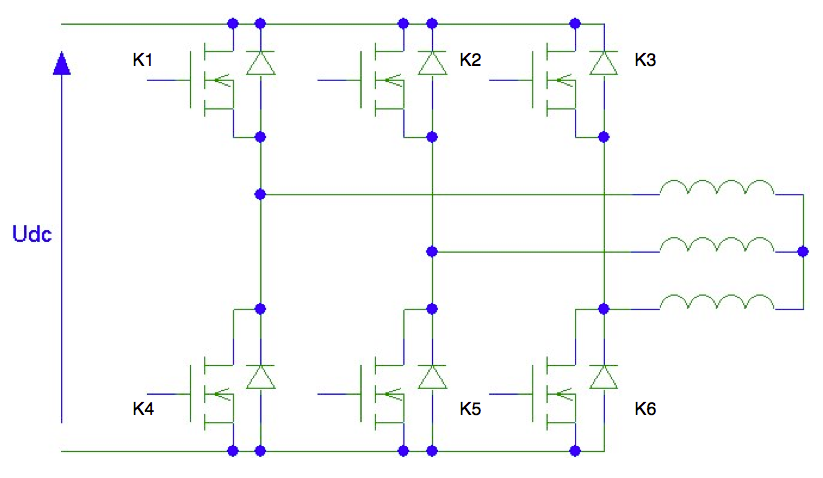
Les transistors K1 à K6 sont amorcés en fonction d'une
loi particulière, appelée "sinus-triangle", qui a pour
fonction de moduler la largeur de l'impulsion de
commutation.
Bien évidemment, lorsque le transistor d'une branche
est passant (K1 par exemple), l'autre (K4 par exemple) est
nécessairement bloqué pour éviter de court-circuiter la
source d’alimentation.
Pilotage des transistors K1 et K5
Le transistor K1 est piloté en fonction d'une loi sinus-triangle. L'onde
de référence, que l'onduleur cherche à délivrer, est appelée modulante.
L'onde triangulaire est appelée porteuse.
On suppose que la fréquence de la porteuse vaut 400 Hz, et que la
fréquence de la modulante vaut 50 Hz.
La modulante du transistor K1 a une phase nulle :

La modulante du transistor K5 est quant à elle décalée d'1/3 de
période :
Le diagramme
ci-dessous représente les porteuses et modulantes de chacune de ces
2 transistors :
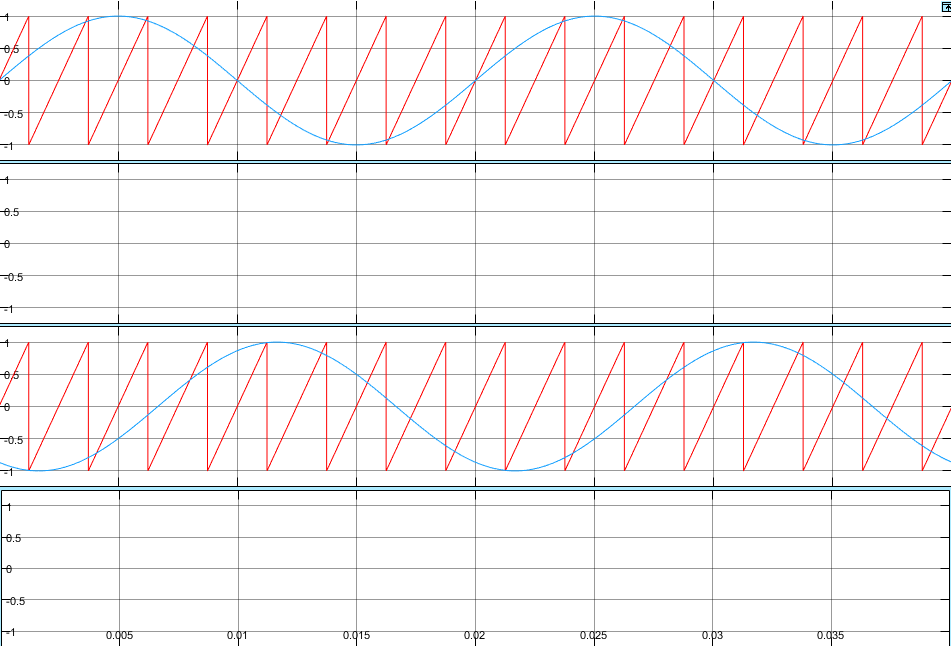
Sachant que les transistors sont amorcés lorsque la tension
de la modulante est supérieure à celle de la porteuse,
représentez les ordres de pilotage sur le diagramme
Simulation du fonctionnement de
l'onduleur
 Téléchargez
fichier Matlab onduleur_MLI_seul.slx
Téléchargez
fichier Matlab onduleur_MLI_seul.slx
Ce modèle représente le convertisseur statique seul, avec deux zones :
* Elaboration des commandes de pilotage des transistors
* Découpage de la tension continue
Les points de prélèvement des 3 phases sont entre chacun des transistors,
sur chacune des 3 branches.
Ouvrez l'objet "Subsystem1" en cliquant sur la flèche grise,
en bas à gauche de l'objet. Comparez l'élaboration des commandes par
rapport à la question précédente.
Insérez maintenant un voltmètre entre les phases 2 et 3. Pour cela :
* Ouvrez l'explorateur de bibliothèques

* Développez Simscape > Power Systems > Specialized
Technology > Fundamental Blocks > Measurements
* Insérez la mesure de tension, et insérez-là entre les phases 2
et 3 : vous mesurez ainsi la tension composée U32
* Pour afficher la tension sur un graphe, il faut à présent
développer Simulink > Sinks et insérer un objet Scope

Double cliquez sur le scope et lancez la simulation. Que
pensez-vous de la forme des signaux ?
La fréquence de la porteuse est en réalité beaucoup trop
faible. Le paramétrage du pilotage des interrupteurs se fait en
double-cliquant sur l'objet "Subsystem1" : saisissez alors la valeur 1000
pour la fréquence de la porteuse.
Relancez la simulation
Simulation du fonctionnement de
l'onduleur sur une charge RL
Lorsque l'onduleur alimente une charge RL, un régime
transitoire s'installe, fonction de la constante de temps L/R de la
charge. Cette charge va avoir comme conséquence indirecte de lisser le
signal de tension.
Sur le modèle Matlab, insérez une charge RL entre les phases
2 et 3, ainsi qu'un ampèremètre :
* Charge RL : Power Systems > Fundamental blocks
> Elements > Series RLC Branch. Vous la paramétrerez en branche
RL, avec R=10 ohm et L=10 mH
* Ampèremètre : dans la même bibliothèque que le voltmètre
Par clic droit sur le scope, définissez 2 entrées et connectez à la
seconde entrée le courant mesuré
Relancez une simulation. Qu'observez-vous ?
Etude de l'onduleur seul couplé avec un moteur asynchrone
Ouvrez à présent le modèle onduleur_MLI.slx
:
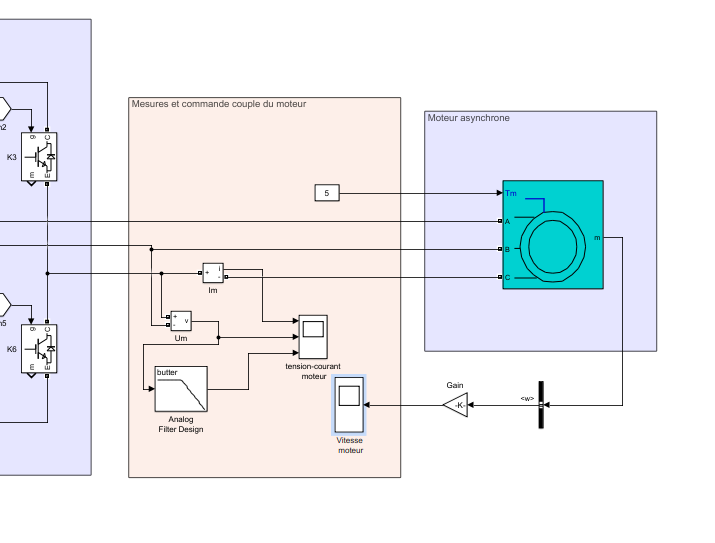
Ce modèle intègre à présent un moteur asynchrone, dont
les caractéristiques devront être remplis par vos soins
Paramètres du moteur asynchrone
Les 2 moteurs du malaxeur sont identiques, mais leur
couplage est différent.
Nous allons étudier le moteur du mélangeur, qui doit être couplé en
triangle : les bobines du stator de la machine asynchrone doivent être
alimentées par une tension composée, ce qui est compatible avec le modèle
que vous avez ouvert.
La plaque signalétique du moteur est reproduite ci-dessous :

En déduire la puissance nominale en VA
Double cliquez sur le modèle du moteur asynchrone, et rentrez les
caractéristiques de puissance nominale, tension RMS (efficace) et
fréquence réseau dans l'onglet "Paramètres".
En revanche, laissez la valeur par défaut de l'inertie, à savoir 0,093
kg.m2.
Simulation à fréquence du réseau
Commencez une simulation avec une fréquence de 50 Hz
(donc aucun changement par rapport à la tension du réseau),
et une fréquence de porteuse égale à 1000 Hz.
La constante injectée dans l'entrée Tm du moteur asynchrone doit par
ailleurs être ajustée à la valeur du couple nominal, multipliée par
100
Simulez le comportement du moteur, et affichez la vitesse de
rotation.
Le résultat vous semble-t-elle cohérent avec les
performances annoncées par le constructeur ?
Simulation à fréquence du réseau
Le mélangeur doit pouvoir tourner
à 1, 2 et 3 Hz.
Lancez une première simulation avec une porteuse à 3 Hz.
Que pensez-vous du résultat ?
Même chose à 2 Hz
Même chose à 1 Hz. Qu'observez-vous ?
Conclure quant au domaine de validité du modèle
FIN DE CETTE PARTIE
Haut de page