TP ANALYSE FONCTIONNELLE ET COMPORTEMENTALE DU DRONE
B.3.3 : Analyse comportementale du servomoteur de bridage -
Activités des expérimentateurs
Mise en situation et objectifs
L'interrupteur
est relié à 2 entrées du micro-contrôleur. C'est la combinaison logique
des états de ces entrées qui permet de connaître la position de cet
interrupteur.
L'objectif de cette partie est de mettre en œuvre un protocole
expérimental afin de fournir aux modélisateurs ces relations logiques.
Servomoteur
de bridage du tangage
La position de ce servomoteur de
bridage dépend donc de la position de l'interrupteur :

 Il
s'agit d'un bouton à trois positions. Or il n’est prévu que deux entrées
numériques du micro-contrôleur, dont l'état est représenté par les
variables logiques RE2 et RE4. C'est la combinaisons des états des deux
entrées qui permettra alors de déterminer la position de l'interrupteur.
Il
s'agit d'un bouton à trois positions. Or il n’est prévu que deux entrées
numériques du micro-contrôleur, dont l'état est représenté par les
variables logiques RE2 et RE4. C'est la combinaisons des états des deux
entrées qui permettra alors de déterminer la position de l'interrupteur.
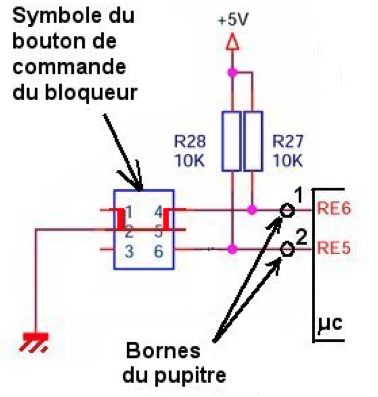
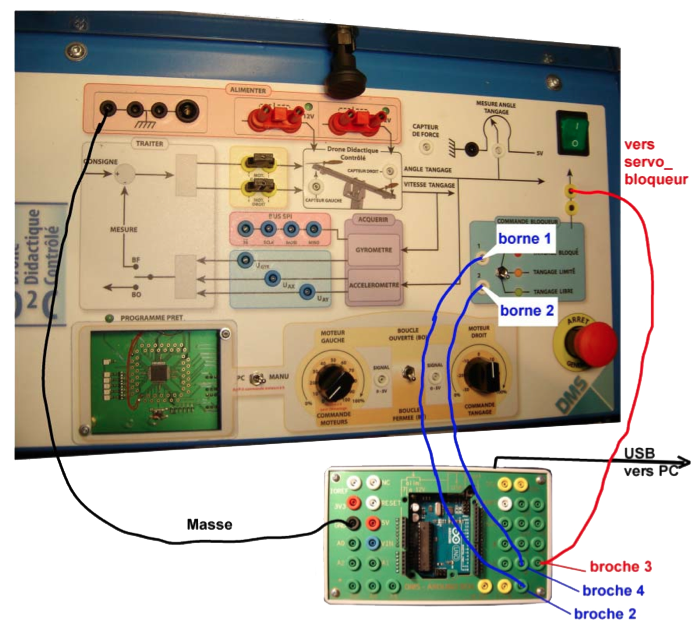
La figure ci-contre représente le schéma de câblage de l'interrupteur
sur les entrées RE2 et RE4 du contrôleur Arduino
Les deux bornes 1 et 2 du pupitre du système D2C sont
reliées aux entrées numériques RE2 et RE4, et sont ainsi disponibles pour
une connexion externe que vous allez exploiter dans cette partie.
État
des entrées en fonction de la position de l'interrupteur
L'équipe des modélisateurs a besoin de connaître les relations
binaires qui permettent de connaître la position de l'interrupteur en
fonction de l'état des entrées RE2 et RE2, reportées sur les bornes 1 et 2
du pupitre.
Vous allez donc créer un montage avec une platine d'essai qui aura
pour but d'allumer des diodes en fonction de l'état des entrées.
Pour cela, vous allez dans un premier temps relier l'Arduino-Box au
pupitre, afin que l'Arduino d'essai puisse récupérer l'état des entrées
RE2 et RE4. Puis vous connecterez cette Arduino-Box à une platine d'essai,
afin d'allumer 2 diodes en fonction de l'état de ces entrées.
Etape
1
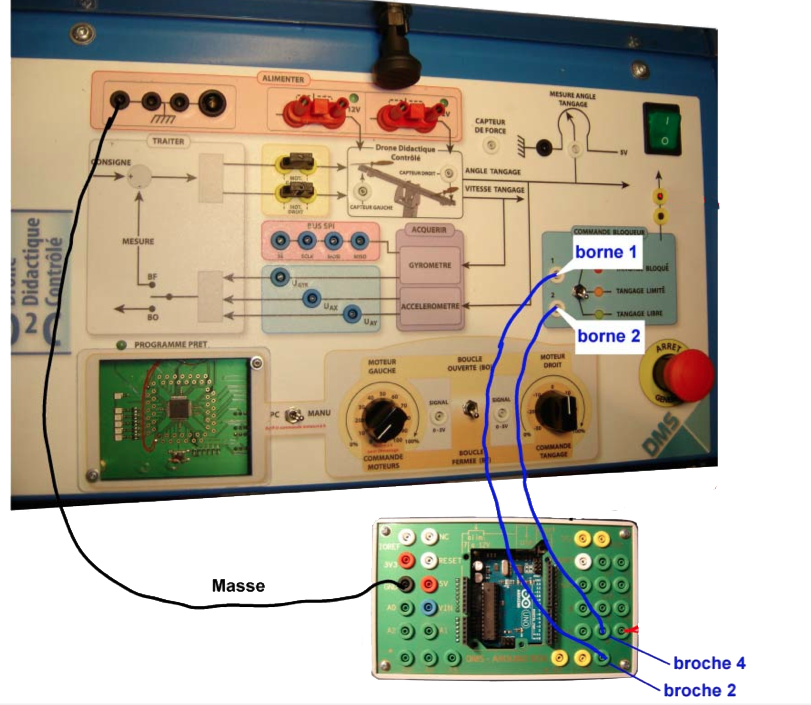
 Il
s'agit dans cette étape de connecter un micro contrôleur externe
Arduino-Box au pupitre du drone, afin de pouvoir récupérer l'état des
entrées RE2 et RE4 du contrôleur interne.
Il
s'agit dans cette étape de connecter un micro contrôleur externe
Arduino-Box au pupitre du drone, afin de pouvoir récupérer l'état des
entrées RE2 et RE4 du contrôleur interne.
Procéder au câblage ci-dessous afin de relier
l'Arduino-Box au système:
Etape
2
Il
s'agit maintenant de relier le micro contrôleur externe Arduino-Box à
une platine d'essai, qui aura pour finalité :
* d'allumer la LED rouge lorsque l'entrée de la borne 1 est à
l'état 1
* d'allumer la LED verte lorsque l'entrée de la borne 2 est à
l'état 1
Lorsqu'une sortie Arduino est active, elle se comporte comme une
source de tension de 5 V.
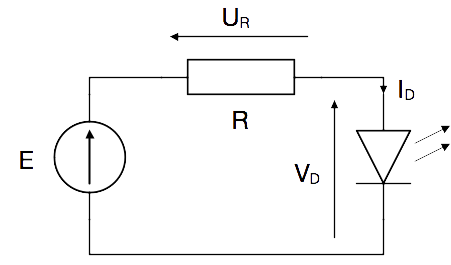 Le
schéma électrique de l'alimentation d'une LED correspondant est alors
représenté ci-contre.
Le
schéma électrique de l'alimentation d'une LED correspondant est alors
représenté ci-contre.
La LED se comporte comme une diode réelle, avec une résistance
interne nulle et une tension de seuil non nulle. Cette tension de seuil
dépend de la couleur de la LED (voir ce
tableau).
Ce tableau montre par ailleurs que le courant maximal admissible est
égal à 20 mA.
Calculer les valeurs des
résistances à insérer dans le cas d'une LED bleue et d'une LED
rouge.
Procéder ensuite au câblage de la platine d'essai, en
insérant les résistances calculées précédemment.
 Les montages sont maintenant prêts à
être exploités.
Les montages sont maintenant prêts à
être exploités.
Question
1
Appeler
le professeur avant toute mise sous tension afin de valider
votre montage.
Mettre en oeuvre le système, et manipuler l'interrupteur
dans les 3 positions. Pour chacune des positions, les LED du montage
s'allument et/ou s'éteignent, représentant ainsi l'état des entrées
RE2 et RE4.
Compléter alors le tableau suivant :
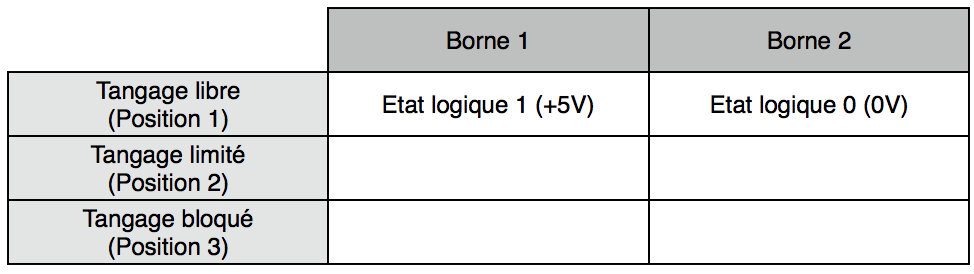
Fournir
ce tableau aux modélisateurs.
Implantation
du graphe d'état dans le micro-contrôleur
Les modélisateurs doivent vous fournir un diagramme d'état sur Matlab,
qui aura été validé par simulation. Ce graphe d'état doit remplacer le
programme du système qui pilote le servo-bloqueur.
Il vous appartient à présent de l'adapter afin de le valider
expérimentalement sur le système.
Le diagramme d'état élaboré sous Matlab a la forme suivante :
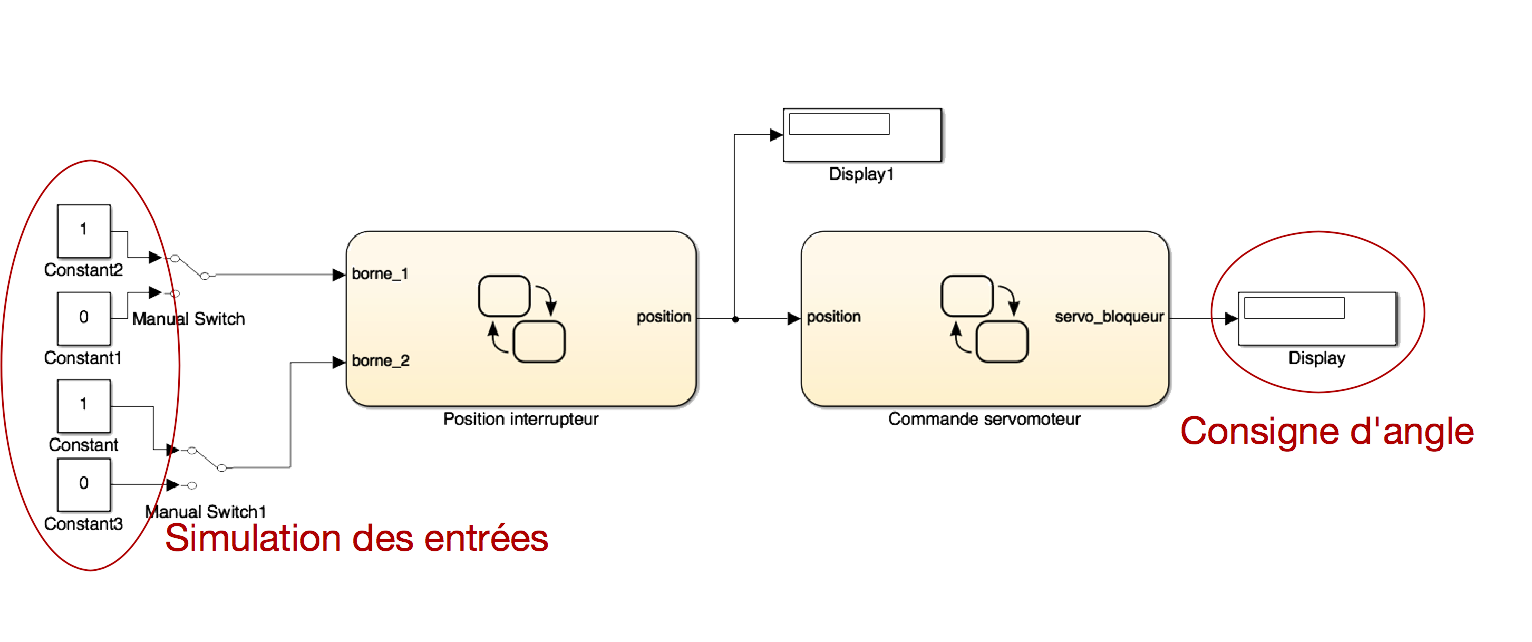
Dans ce diagramme d'état, les entrées borne_1 et borne_2
correspondent aux entrées RE2 et RE4, et le scope Display
affiche la consigne d'angle envoyée au servomoteur.
Vous devrez dans cette partie modifier ce diagramme afin de remplacer
:
* les simulations d'entrées par l'acquisition de l'état réel (2)
et (4) des entrées du micro-contrôleur
* l'affichage par un envoi de consigne vers le servomoteur
connecté sur la sortie (3) du micro-contrôleur
Question
2
Récupérer
le fichier auprès des modélisateurs, et l'ouvrir avec
Matlab.
La bibliothèque Simulink intègre un
package dédié aux contrôleurs Arduino. Vous n'aurez besoin que de
l'acquisition logique et de la sortie servomoteur.
Modifier le diagramme d'état afin d'insérer les
objets assurant la liaison entre l'Arduino et le système :
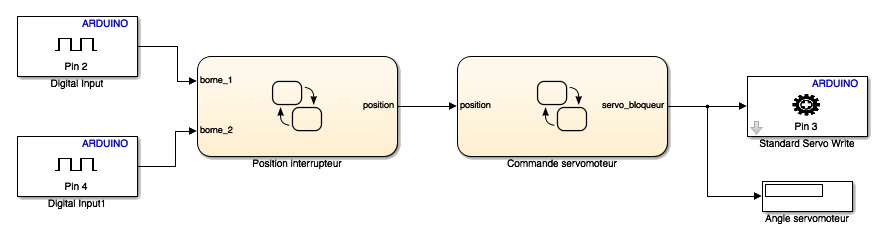
Enregistrer ce diagramme.
Dans la suite du travail sous Matlab, il faudra toujours gérer
la connexion des fils de commande des actionneurs (servo-moteur ou
moteurs) de la manière suivante :
- d’une part vérifier qu’ils ne sont pas connectés avant de
lancer l’exécution du programme sous Matlab-Stateflow ; ne les
connecter que lorsque le programme est pleinement opérationnel ;
- d’autre part les déconnecter avant d’arrêter l’exécution du
programme sous Matlab-Stateflow.
Il va falloir à présent transférer ce diagramme dans le contrôleur
de l'Arduino box.
Question
3
Le
micro-contrôleur présent est un Arduino Méga 2560. Suivre la procédure
suivante pour configurer, transférer, et suivre l'état du diagramme en
temps réel :
1. Configurer le type de contrôleur (Ctrl+E)
: Sélectionner Hardware Implementation et choisir Arduino
Mega 2560. Appliquer et fermer la fenêtre
2. Transférer le programme en cliquant
sur l'icône  ou en appuyant sur
les touches Ctrl+B
ou en appuyant sur
les touches Ctrl+B
3. Le programme est alors transféré dans le contrôleur
Arduino, et vous pouvez procéder au câblage de la sortie (3) sur le
pupitre :
3.1 Retirer le cavalier du pupitre
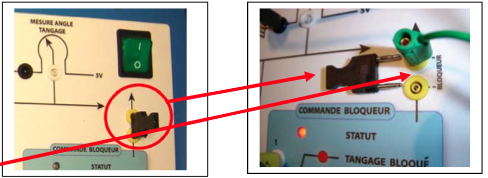
3.2 Connecter la broche 3 à la commande du servomoteur une
fois seulement que le transfert vers le micro-contrôleur est
effectué
Sur l'ordinateur sur lequel s'exécute Matlab, il est possible de visualiser
l'évolution du diagramme et l'état des différentes variables en
lançant une simulation en mode externe.
Vérifier que le système se comporte conformément
aux attendus.
Analyser les éventuels écarts.
Déconnecter la borne 3 et remettre la cavalier
noir en place.
FIN DE CETTE PARTIE
Haut
de page