TP ANALYSE FONCTIONNELLE ET COMPORTEMENTALE DU DRONE
B.1.2 : Contexte général - Activités des expérimentateurs
Mise en situation et objectifs
Lors
de la mise en énergie du drone, la centrale inertielle doit transmettre
au calculateur ses valeurs de référence.
Néanmoins ces valeurs de référence doivent être relevées lorsque la
centrale est parfaitement stabilisée, en position horizontale : il est
donc nécessaire de réaliser une procédure d’initialisation.
Sur un drone réel, l’utilisateur doit poser la machine quelques
instants sur une surface horizontale pour réaliser cette phase
d’initialisation.
Sur le drone didactique, c’est le « servo-bloqueur » qui positionne
automatiquement le balancier à l’horizontal quelques instants, après la
mise en énergie, pour que le micro-contrôleur puisse récupérer les
valeurs de référence de la centrale inertielle.
Vous devrez dans cette partie manipuler le système didactisé, et
identifier la mise en œuvre du servo-bloqueur.
Manipulation
du système D2C
Question
1
Prendre connaissance de la Notice de
mise en route du système, en particulier la page 4.
Manipuler le système, et observer
son comportement du système dans la configuration suivante :
* Mode "Manuel"
* Fonctionnement en "Boucle fermée"
* Commande bloqueur en mode "Tangage limité"
Servomoteur
de bridage du tangage
Question
2
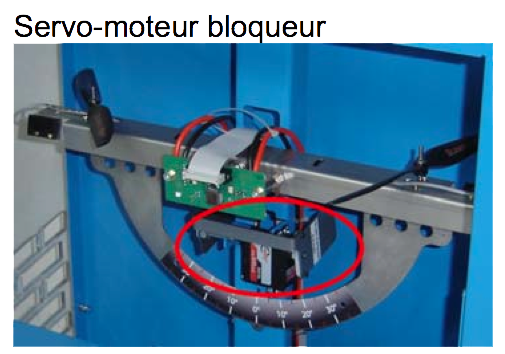
 Localiser
le servo-bloqueur sur le système.
Localiser
le servo-bloqueur sur le système.
La position de ce servo-bloqueur
de bridage dépend de la position de l'interrupteur.
Observer le comportement du servo-bloqueur
en fonction de la position de l'interrupteur.
Chacune de ces positions sera notée :
* position1 pour le tangage libre
* position2 pour le tangage limité
* position3 pour le tangage bloqué
FIN DE CETTE PARTIE
Haut
de page