la
TP DISTRIBUTION DE L'ENERGIE ET CINEMATIQUE DE LA
CORDEUSE
B.2.3 Distribution de l'énergie électrique -
Activités des modélisateurs
Présentation
Question
2
Prendre connaissance
du schéma électrique,dont un extrait
est reproduit ci-dessous:
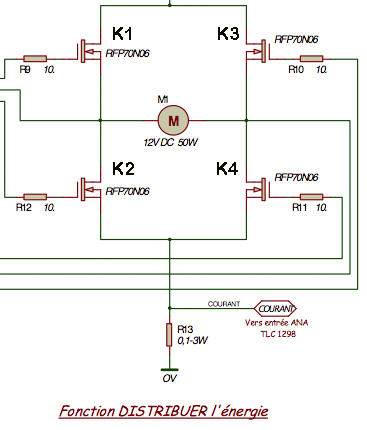 Dans ce schéma, la fonction "Distribuer
l'énergie" est assurée par 4 transistors MOSFET, repérés Q1 à Q4.
Dans ce schéma, la fonction "Distribuer
l'énergie" est assurée par 4 transistors MOSFET, repérés Q1 à Q4.
Ces transistors jouent le rôle d'interrupteurs commandés, et vont
ainsi permettre d'autoriser le passage du courant dans le moteur M
dans un sens ou dans un autre.
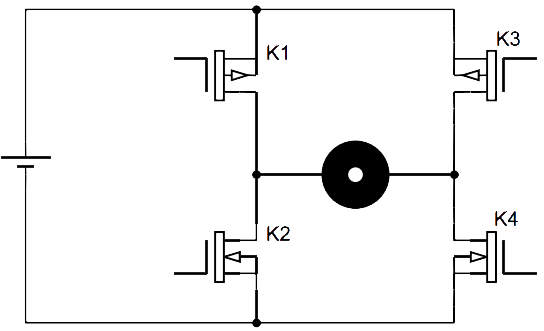
Ce type de montage est appelé "Pont en H", et se représente de
façon simplifiée comme suit :
Variation de vitesse
Avant d'étudier
l'inversion du sens de rotation d'un moteur, vous allez en premier lieu
aborder la variation de vitesse.
Question
2
Prendre connaissance
du principe de fonctionnement d'un hacheur (document ressource).
 La
vitesse de rotation d'un moteur à courant continu est fonction de sa
fém, et donc de la tension qui lui est appliquée à ses bornes.
La
vitesse de rotation d'un moteur à courant continu est fonction de sa
fém, et donc de la tension qui lui est appliquée à ses bornes.
Pour faire varier la vitesse de rotation d'un MCC, il suffit donc de
faire varier sa tension d'alimentation. Le problème est que les sources
d'alimentation continue délivrent une tension constante.
La variation de la tension se fera alors en découpant le signal, à
une fréquence dont la période est très faible devant la constante de
temps du moteur. Ainsi, ce dernier ne voit à ses bornes qu'une tension
moyenne lissée (voir ci-contre)
Question
3
Ce
phénomène est modélisé dans Scilab avec le modèle suivant : Hacheur_1Q.zcos

La fréquence de découpage est paramétrée dans le bloc "PWM".
L'échelon, compris entre 0 et 255, définit le "rapport cyclique" :
- si PWM=0, alors le rapport vaut α=0
(aucune commutation)
- si PWM=255, alors le rapport vaut α=1
(passant permanent)
La diode, dite de "roue libre", a pour fonction de laisser
circuler le courant lorsque le contact est rompu, et ainsi dissiper
l'énergie accumulée par le moteur.
Ouvrir
ce modèle dans Scilab. Préciser s'il
s'agit d'une modélisation causale ou acausale.
Simuler le fonctionnement
avec un rapport cyclique de 0,6 (donc un échelon égal à 0,6x255=153) et
une fréquence de découpage de 500 Hz.
Relever la vitesse de rotation du moteur et
l'allure des courbes de vitesse et de courant.
Question
4
Refaire une simulation
avec cette fois un rapport cyclique égal à 0,2.
Relever la nouvelle
vitesse de rotation et l'allure des
courbes de vitesse et de courant.
Conclure sur l'influence du rapport
cyclique.
Refaire une simulation avec cette fois une
fréquence de découpage égale à 50 Hz.
Relever l'allure des courbes de vitesse et de
courant. Qu'observe-t-on de particulier sur la valeur
du courant ?
Conclure sur l'influence de
la fréquence de découpage.
Etude des quadrants de fonctionnement
Question
5
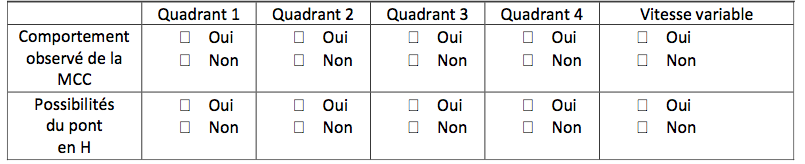
Les
expérimentateurs ont effectué une série de relevés de tension et de
courant aux bornes du moteur.
Demander ces valeurs afin d'étudier le
fonctionnement du pont en H.
A partir de ces valeurs, compléter le
tableau
ci-dessous en indiquant d'une part le comportement du moteur
observé sur la cordeuse, et d'autre part les possibilités offertes par
le pont en H :
Stratégie de commande des transistors
Question
6
Télécharger
et ouvrir l'ébauche
de fichier à l'aide du logiciel en ligne https://www.draw.io
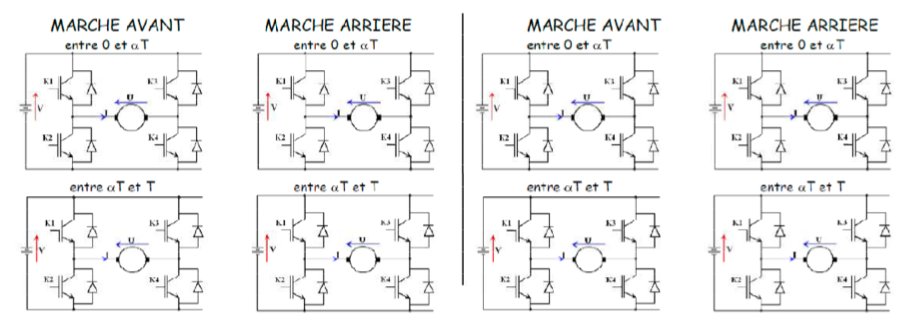
Sur ce fichier, Tracer sur la
figure ci-dessous, pour chacune des stratégies de commande
(deux cas unipolaires et un cas bipolaire), l'allure de
la tension aux bornes du moteur.
En
déduire l'expression de la valeur moyenne <u> de
la tension u(t) pour les 3 cas représentés ci-dessous :

Tracer le trajet du
courant dans chaque situation sur les schémas ci-dessous, en tenant
compte qu'il n'y a qu'un fonctionnement moteur :
Exporter le fichier au format pdf pour l'inclure
dans le compte-rendu.
Question
7
Le
fichier Pont_H_MCC.zcos
modélise un pont en H. Télécharger ce ficher.
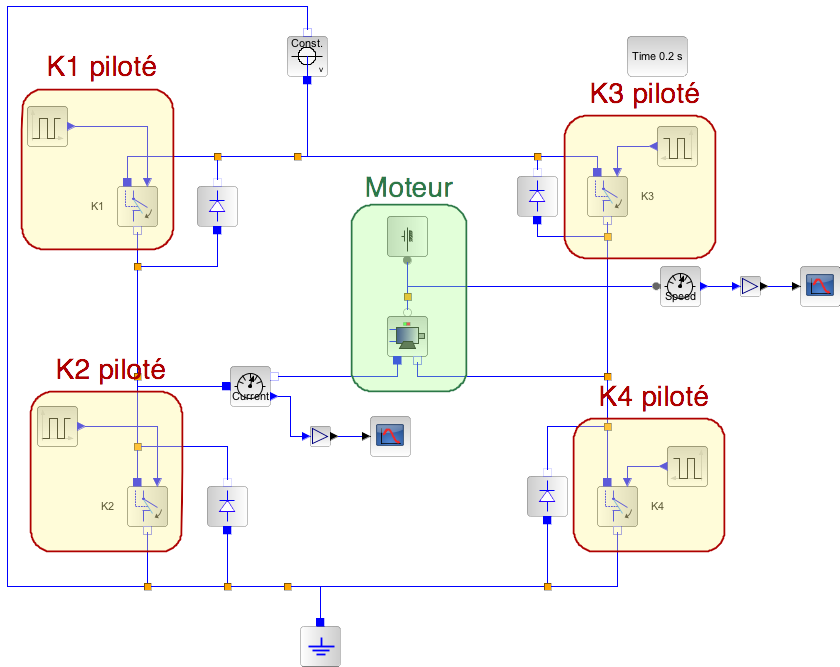
Les signaux carrés représentent le pilotage périodique des
interrupteurs. Ils sont cadencés à une fréquence de 500 Hz.
Ouvrir ce fichier, et paramétrer correctement
ces signaux carrés , de façon à mener les simulations suivantes :
1. Transistors K1 et K4 bloqués, transistor K2 passant,
transistor K3 avec un rapport cyclique égal à 0,8 (donc une entrée à
80% de largeur de période)
2.
Transistors K2 et K3 bloqués, transistor K4 passant, transistor K1
avec un rapport cyclique égal à 0,8
3. Transistors K2
et K3 commutés avec un rapport cyclique égal 0,8, transistors K1
et K4 bloqués
4. Transistors K2
et K3 commutés avec un rapport cyclique égal 0,8, transistors K1
et K4 commutés avec un rapport cyclique égal à 0,2 décalés de
1.6e-3 seconde
(modélisation de la commande bipolaire)
Effectuer les simulations et relever
la vitesse du moteur dans chacun des cas.
Vérification expérimentale
Question
8
Les
expérimentateurs devront visualiser les signaux tension / courant de
la MCC, afin de conclure sur les quadrants de fonctionnement et la
validité de la stratégie de commande pour la variation de vitesse.
Vous devez soumettre votre problématique aux
expérimentateurs et élaborer avec eux un protocole expérimental
permettant cette observation
FIN DE CETTE PARTIE
Haut de page