Présentation générale de l'axe numérique -
Activités des expérimentateurs
Les modélisateurs et le chef de projet étudient et simulent le
comportement de l'axe numérique à partir des équations issues d'un modèle
de connaissance. On se propose ici de déterminer expérimentalement le
modèle de comportement du système afin de valider le modèle de
connaissance.
Il s'agira d'identifier les caractéristiques du système par des
relevés :
* du comportement indiciel en boucle ouverte,
* du comportement fréquentiel du système en boucle ouverte,
* du comportement indiciel en boucle fermée.
L'ensemble des expérimentations se fera avec une interface
de puissance en tension.
Identification par réponse indicielle en boucle ouverte
Ouvrir le logiciel D_Axnum
et configurer l'interface de la façon suivante :
* Mode de commande : boucle ouverte (menu Choisir >
Mode de commande)
* Interface de puissance : commande tension (menu Choisir
> Interface de puissance)
* Période d'échantillonnage : 0,005 s (menu Configurer
> Échantillonnage)
Paramétrer l'essai avec un échelon de 10 V, une
position de repos à 20 mm et un déplacement de 30 mm. Les valeurs à
visualiser sont la commande Sr et la
vitesse de déplacement Mx'.
Procéder à l'essai, et afficher
le résultat.
Question
2
En déduire l'ordre dominant de
l'axe numérique en boucle ouverte. Identifier ses paramètres caractéristiques, et donner
l'expression de sa fonction de transfert.
Identification par réponse harmonique en boucle ouverte
Paramétrer
l'essai avec cette fois :
* une position de repos à 100 mm et un déplacement de 60 mm,
* une
sollicitation sinusoïdale d'amplitude 20 V,
* différentes pulsations croissantes : 1 rad/s, 2 rad/s, 5
rad/s, 10
rad/s, 20
rad/s, 30
rad/s, 40
rad/s, 50
rad/s, 60
rad/s, 70
rad/s et 80
rad/s.
Les valeurs à visualiser sont encore la
commande Sr et la vitesse de déplacement Mx'.
Question
4
Procéder
aux essais et afficher les courbes. Il
est possible d'appliquer des couleurs spécifiques aux courbes (menu Configuer
> Couleurs).
Pour chacun des essais, calculer
à partir des valeurs des courbes la valeur du gain et
la valeur en ° du déphasage.
Reporter ces valeurs dans un tableau afin de construire
ultérieurement les diagrammes de Bode.
Question
5
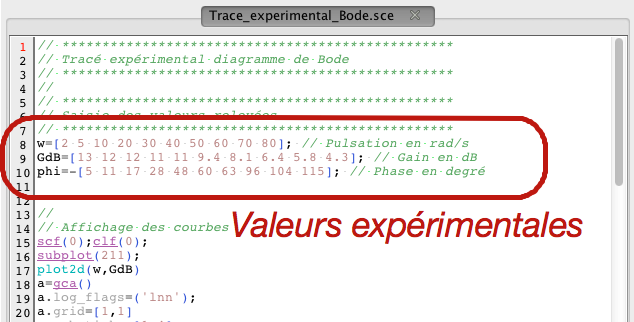
Télécharger le fichier de tracé expérimental de
diagramme de Bode (voir documents ressources), et l'ouvrir
avec Scilab.
Ce programme vous permet de tracer les gains et phases relevés. Mettre
à jour les lignes 8 à 10 du programme en construisant les
vecteurs :
* w : pulsations des essais
* GdB : gains en décibel de chacun des essais
* phi : phase en degrés de chacun des essais
Exécuter le programme. Les tracés expérimentaux
de Bode s'affichent.
Identifier à partir de ces relevés l'ordre
probable du système, le gain, et la ou les pulsations de cassure.
On rappelle que :
* dans un système du 1er ordre, la phase vaut -45° à la
pulsation de cassure,
* dans un système du 2d ordre sous-amorti, la phase vaut -90°
à la pulsation de cassure,
* dans un système du 2d ordre amorti, la phase vaut environ
-45° au premier pôle, environ -135° au second pôle, et -90° à la
pulsation propre. Donner l'expression de la fonction de transfert
en boucle ouverte. Confronter cette analyse harmonique à l'analyse
indicielle menée à la partie précédente (gain et pôles
caractéristiques).
Ouvrir
une fenêtre Xcos, et construire un modèle causal
dans lequel figurent les deux fonctions de transfert précédemment
identifiées : Simuler le comportement et observer
la réponse à un échelon de 10 V. Conclure sur le choix de la fonction de
transfert et sur l'ordre du système en boucle ouverte.
Question
4
Ouvrir une nouvelle fenêtre Xcos, et construire
le modèle causal d'un asservissement en position.
Cet asservissement comprend :
* la consigne en position,
* une commande avec un correcteur PI et le gain K2=8,631 V/mm,
* le process modélisé par la fonction de transfert en boucle
ouverte précédemment identifiée,
* un retour unitaire.
Insérer dans le modèle :
* les points d'entrée et de sortie de la boucle ouverte afin
de tracer les diagrammes de Bode du système asservi en position.
* un bloc "Bode" paramétré avec les pulsations 1 rad/s en
valeur minimale et 10000 rad/s en valeur maximale.
Paramétrer /
* le correcteur PI avec Kp=1 et Ki=0,
* l'intégrateur avec une condition initiale égale à 26 mm,
* l'échelon avec un début à 0.1 s, une valeur initiale égale à
26 mm et une valeur finale de 50 mm.
Simuler la réponse du système à un échelon de 26
mm.
Validation du comportement en boucle fermée
Question
5
Procéder à un essai en boucle
fermée, en paramétrant
l'interface comme suit :
* Mode commande : boucle fermée > PID position
* Correction proportionnelle : K1=1
* Corrections intégrale et dérivée : non prises en compte
(interrupteurs ouverts)
* Consigne : échelon de valeur C=50 mm (position de repos 26
mm)
* Valeurs à visualiser : consigne C
et position M.
Visualiser la courbe, et la comparer
au résultat de la simulation. Conclure sur la
validité du modèle.
Question6
Procéder à un second essai avec
cette fois Kp=4. Comparer avec la simulation dans laquelle le
correcteur PI aura été mis à jour avec Kp=4. Conclure.
Etude de la stabilté
Question
7
Analyser les diagrammes de Bode
fournis par Scilab. Conclure sur la nécessité de corriger le
système de façon à assurer une marge de stabilité de 45°.