Vous allez dans cette partie élaborer le modèle de connaissance de
l'axe numérique. Cette étude vous permettra de déterminer analytiquement
les performances de l'axe numérique, et conclure sur le respect du cahier
des charges.
A l'aide du modèle de connaissance
du moteur à courant continu, construire le schéma bloc
de l'asservissement, dont la structure générale est donnée ci-dessous
:
Question
2
Donner l'expression de la fonction d'adaptation Ka.
Question
3
Établir l'expression de la
fonction de transfert en boucle ouverte FTBO(p)=Ω(p)/ε(p) avec un
correcteur C(p)=1.
Faire l'application numérique.
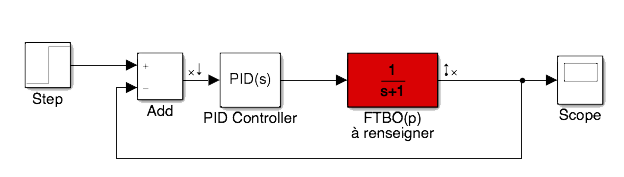
Ouvrir le logiciel Matlab, puis une fenêtre Simulink. Créer le schéma de la boucle ouverte avec la
fonction de transfert FTBO(p) du balancier trouvée à la question 3,
sur le modèle suivant :
Question
7
En
s'aidant du document ressource sur Simulink, Définir les
points d'entrée et de sortie de la boucle ouverte. Faire tracer les diagrammes de Bode du
système.
Conclure sur le respect de l'exigence de
stabilité du cahier des charges.
Question
8
Justifier que l'erreur statique de cet asservissement
en vitesse est nul.
Correction du système
On souhaite à présent corriger le système de façon à :
* avoir l'asservissement le plus rapide,
* et assurer une marge de phase suffisante pour garantir la
stabilité de l'asservissement : MP≥45° On envisage pour cela un correcteur à action
proportionnelle C(p)=Kp.
Question
9
Ecrire
l'expression de la fonction de transfert en boucle
ferméeFTBF(p)=Ω(p)/ΩC(p).
En déduire l'expression du coefficient
d'amortissement en fonction du gain de la FTBO, de la constante de
temps et du coefficient Kp. Rappeler la valeur du coefficient
d'amortissement permettant d'obtenir le temps de réponse à 5% le
plus faible, et calculer la valeur du
coefficient Kp correspondant.
Question
10
Paramétrer
le bloc "PID" du modèle Simulink avec cette valeur, et
simuler le comportement du système. Mesurer le temps de réponse à 5%.
Question
11
Tracer les diagrammes de Bode avec ce correcteur, et
conclure sur le respect de l'exigence de stabilité.