Présentation générale de l'axe numérique -
Activités des expérimentateurs
Les modélisateurs et le chef de projet étudient et simulent le
comportement dudrone à partir des équations issues d'un modèle de
connaissance ou d'un modèle de comportement. On se propose ici de
déterminer expérimentalement le modèle de comportement du système afin de
valider le modèle de connaissance.
Il s'agira d'identifier les caractéristiques du système par des
relevés :
* du comportement indiciel en boucle ouverte,
* du comportement fréquentiel du système en boucle ouverte,
* du comportement indiciel en boucle fermée.
Identification par réponse indicielle en boucle ouverte
Le modèle de
connaissance du bras de tangage du drone aboutit à la structure
suivante de l'asservissement en vitesse
:
Il vous est demandé de modéliser par un modèle de comportement la
fonction de transfert des moteur, qui produit une poussée en fonction
d'une consigne de tension exprimée en points numériques.
On se propose de déterminer
expérimentalement le modèle de comportement des moteurs, afin de pouvoir
exprimer les fonctions de transfert manquantes dans le modèle.
Cette fonction de transfert Hm(p)=F(p)/U(p) permet d'exprimer la force
de poussée F en fonction de la tension U appliquée sur les moteurs.
Le modèle de comportement sera établi après un relevé expérimental que
vous allez mener.
Question
1
A l'aide
des protocoles disponibles dans les documents ressource, procéder
à l'essai en boucle ouverte des moteurs, et visualiser les
courbes de consigne (en points numériques) et de poussée (en mN). Procéder à plusieurs essais à différentes
valeurs :
* Gaz 30% et ± 10%
* Gaz 40% et ± 15%
Question
2
Afficher les courbes, et en déduire :
* l'ordre probable du comportement des moteurs,
* le gain en N/points,
* la constante de temps.
Identification par réponse harmonique en boucle ouverte
Paramétrer
les essais avec cette fois :
* une valeur de gaz moyenne de 30%,
* une
sollicitation sinusoïdale d'amplitude 15%,
* différentes pulsations croissantes : 0,5 rad/s, 1 rad/s,
2 rad/s, 5
rad/s, 10
rad/s, 20
rad/s, 30
rad/s, 40
rad/s, 50
rad/s, 60
rad/s, 70
rad/s et 80
rad/s.
Question
4
Procéder
aux essais et afficher les courbes.
Pour chacun des essais, calculer
à partir des valeurs des courbes la valeur du gain et
la valeur en degrés du déphasage.
Reporter ces valeurs dans un tableau afin de construire
ultérieurement les diagrammes de Bode.
Question
5
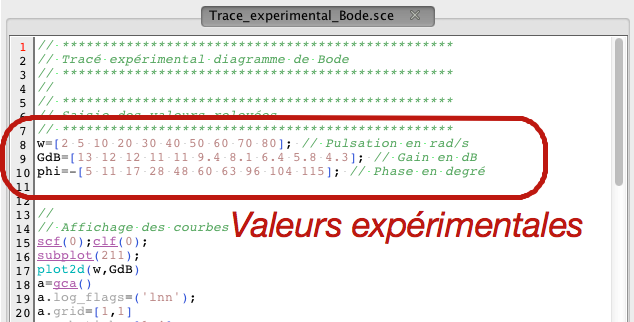
Télécharger le fichier de tracé expérimental de
diagramme de Bode (voir documents ressources), et l'ouvrir
avec Scilab.
Ce programme vous permet de tracer les gains et phases relevés. Mettre
à jour les lignes 8 à 10 du programme en construisant les
vecteurs :
* w : pulsations des essais
* GdB : gains en décibel de chacun des essais
* phi : phase en degrés de chacun des essais
Exécuter le programme. Les tracés expérimentaux
de Bode s'affichent.
Identifier à partir de ces relevés l'ordre
probable du système, le gain, et la ou les pulsations de cassure.
On rappelle que :
* dans un système du 1er ordre, la phase vaut -45° à la
pulsation de cassure,
* dans un système du 2d ordre sous-amorti, la phase vaut -90°
à la pulsation de cassure,
* dans un système du 2d ordre amorti, la phase vaut environ
-45° au premier pôle, environ -135° au second pôle, et -90° à la
pulsation propre. Donner l'expression de la fonction de transfert
en boucle ouverte.
Confronter cette analyse harmonique à l'analyse
indicielle menée à la partie précédente (gain et pôles
caractéristiques).
Ouvrir
une fenêtre Xcos, et construire un modèle causal
dans lequel figurent les deux fonctions de transfert précédemment
identifiées : Simuler le comportement et observer
la réponse à un échelon de 4415 à 5145. Conclure sur le choix de la fonction de
transfert et sur l'ordre du système en boucle ouverte.
Réglage empirique du correcteur PID du système asservi
La démarche proposée ici est une démarche purement expérimentale
qui permet d’apprécier physiquement l’effet de chaque composante du
correcteur. Les modélisateurs sont en charge de la détermination
analytique de ce correcteur.
Expérimenteren boucle
fermée de vitesse avec Kp2 = 1 (et autres coefficients à 0). Le
protocole expérimental est décrit dans la fiche des documents
ressource.
Ajustement de la correction
proportionnelle
Question
8
Le
réglage initial du correcteur est : Kp2=1; Ki2=0; Kd2=0;
Puls-Fd=0.
Expérimenter dans les mêmes conditions
qu’à la question 7, en augmentant progressivement Kp2 (de 0,5 en
0,5), avec (Ki2 = 0 ; Kd2 = 0, Puls-Fd = 0) afin d'obtenir un
comportement avec oscillations régulières de vitesse, en
limite d’instabilité Choisir un réglage final de Kp2 un peu
inférieur à la moitié de cette valeur de Kp2 limite. Cette
méthode est adaptée de la méthode de Ziegler-Nichols. Enregistrer l’acquisition, et analyser
la précision de vitesse obtenue avec ce réglage. Proposer
des explications aux défauts éventuels de précision.
Ajustement de la correction intégrale
Le réglage
précédent a dû conduire à un résultat voisin de Kp2 = 0,8 à
0,5 avec (Ki2 = 0 ; Kd2 = 0 ; Puls-Fd = 0)
Avec la valeur de Kp2 déduite de la question 8, il s’agit
maintenant d’expérimenter pour régler le coefficient Ki2 de façon
à augmenter la résistance du système aux perturbations
(précision).
Question
9
Il s’agira
(à vitesse nulle) de générer une perturbation avec la « tige de
déstabilisation » présentée ci-dessous dans les conditions
d’expérimentation, pour faire en sorte qu’après suppression de la
perturbation, le système reprenne sa position précédente (effet de
l’intégrateur). Augmenter progressivement Ki, depuis 0 par
paliers de 0,0005 jusqu’à obtenir le comportement indiqué, sans
oscillations trop importantes. Donner la valeur de Ki qui convient.
Ajustement de la correction dérivée
Avec Kp2 = 0,5 à
0,8 la manipulation précédente a dû conduire à un résultat
voisin de Ki2 =0,001.
L’objectif est maintenant de montrer l’effet stabilisant de la
correction dérivée. (Remarque : le correcteur dérivé est en
réalité un correcteur « dérivé-filtré », de gain dérivé Kd2
et de pulsation de cassure du filtre dérivé notée « Puls-Fd » ;
on utilisera sans explications Kd2 = 6 et une pulsation Puls-Fd = 50
rd/s)
Question
10
Expérimenter
pour montrer l’effet stabilisant du correcteur dérivé. Montrer que le coefficient Kp peut être encore
augmenté grâce à ce correcteur dérivé et que le système peut
être encore plus rapide (réactif) que précédemment
Conclure par un tableau qui récapitule l’effet
obtenu sur la boucle d’asservissement par chacun des correcteurs P ; I
; D.

 Télécharger le fichier de tracé expérimental de
diagramme de Bode (voir documents ressources), et l'ouvrir
avec Scilab.
Télécharger le fichier de tracé expérimental de
diagramme de Bode (voir documents ressources), et l'ouvrir
avec Scilab.
