Etude de l'axe numérique - Activités des
modélisateurs
L'objectif de cette partie est d'étudier l'asservissement en vitesse
de l'axe numérique dans un premier temps, puis l'asservissement de
position.
Les performances attendues de l'asservissement de vitesse sont les
suivantes :
* temps de réponse tr5% inférieur à 2 s,
* erreur statique nulle,
* marge de phase supérieure ou égale à 60°,
* robustesse face aux perturbations.
Il faudra pour cela :
* construire un modèle causal de l'asservissement de vitesse,
* relever le modèle de comportement du moteur par un relevé
expérimental,
* évaluer les performances du système non corrigé,
* améliorer ces performances par l'ajout d'un correcteur à action
proportionnelle et intégrale approprié.
Construction du modèle de l'asservissement de vitesse
Prise en main du modèle et calcul du
gain d'adaptation
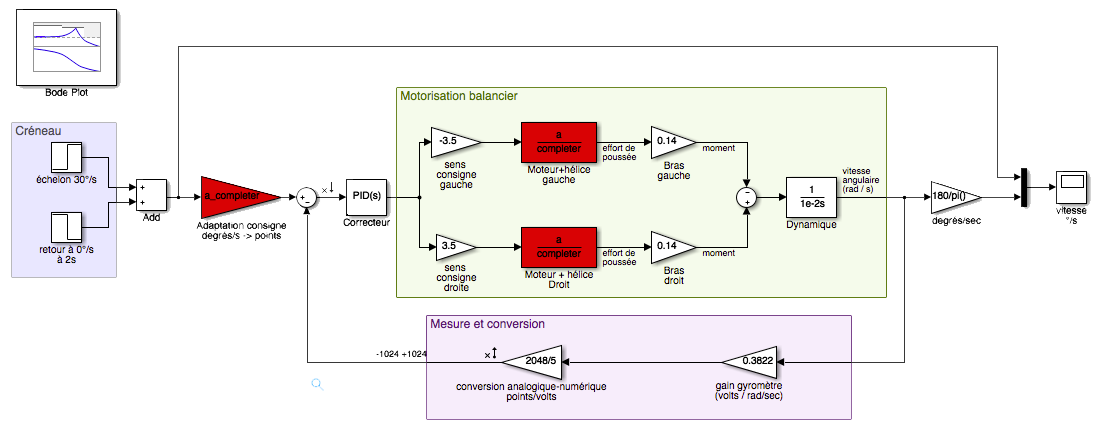
A l'aide du modèle de connaissance
du moteur à courant continu, identifier dans le schéma bloc
de l'asservissement ci-dessous les expressions des différentes
fonctions de transfert : Donner
l'expression de la fonction d'adaptation Ka, puis calculer
sa valeur numérique.
Question
2
Ouvrir Matlab,
puis Simulink. Télécharger puis ouvrir le modèle
causal de l'asservissement (disponible dans les documents ressource) :
Ce modèle est incomplet : il faut renseigner la valeur du gain
d'adaptation et les fonctions de transfert des moteurs. Paramétrer le gain d'adaptation avec la valeur
du gain Ka calculée à la question précédente.
On se propose de déterminer expérimentalement le modèle de
comportement des moteurs, afin de pouvoir exprimer les fonctions de
transfert manquantes dans le modèle.
Cette fonction de transfert Hm(p)=F(p)/U(p) permet d'exprimer la force
de poussée F en fonction de la tension U appliquée sur les moteurs.
Le modèle de comportement sera établi après un relevé expérimental que
vous allez mener.
Question
3
Se rapprocher
des expérimentateurs afin qu'ils vous expliquent la mise en oeuvre du
drone.
A l'aide des protocoles disponibles dans les documents ressource,
procéder à l'essai en boucle ouverte des moteurs, et
visualiser les courbes de consigne (en points numériques) et de
poussée (en mN). Enregistrer cet essai afin de pouvoir libérer le
poste pour les expérimentateurs.
Question
4
Ouvrir le
logiciel D2C sur votre poste de travail et charger
le fichier de mesure précédent. Afficher les courbes, et en déduire :
* l'ordre probable du comportement des moteurs,
* le gain en N/points,
* la constante de temps.
Question
5
Renseigner
dans le modèle Simulink les fonctions de transfert des moteurs, afin d'achever
la modélisation.
Le correcteur est inchangé, avec C(p)=1. Simuler la réponse du système à un créneau de
vitesse de rotation de 0°/s-30°/s-0°/s, de période 2s (il s'agit de la
consigne par déjà paramétrée dans le modèle).
Question
7
Procéder à un nouvel essai
expérimental, cette fois en boucle fermée. Il s'agit de visualiser la
réponse de l'asservissement à un créneau de 0°:S-30°/s-0°/s, avec :
* la boucle fermée "Gyro"
* Kp2=1 ; Ki2=0 ; Kd2=0.
Le protocole est décrit dans la fiche disponible dans les
documents ressource.
Enregistrer les résultats de cet essai, et le comparer
à la simulation.
Première correction du système
On souhaite à présent vérifier et améliorer les performances
suivantes du cahier des charges : stabilité, rapidité, précision.
Question
8
Afficher les diagrammes de Bode
en double-cliquant sur l'objet "Bode Plot" du modèle Simulink.
Analyser les marges de stabilité. Conclure
sur l'état du système non corrigé. Déterminer la valeur du correcteur à action
proportionnelle à installer qui permet de respecter les performances
souhaitées en terme de stabilité.
Question
9
Simuler le comportement du
système ainsi corrigé. Conclure, par analyse de la réponse indicielle,
sur les trois critères de performance évoqués plus haut (stabilité,
rapidité et précision).
Seconde correction du système
On souhaite à présent s'assurer que le système est robuste face aux
perturbations de couple qui peuvent s'exercer sur le bras (ces
perturbations peuvent être par exemple des rafales de vent lors d'un
vol).
Question
10
Insérer dans votre modèle
Simulink une perturbation de couple, en amont de la dynamique du
système. Cette perturbation sera modélisée par un échelon de valeur
0.002 Nm à t=6 s. Simuler le comportement du bras, et observer
plus particulièrement l'influence de la perturbation à partir de t=6
s. Conclure sur la robustesse de l'asservissement
face aux perturbations de couple.
Pour corriger le défaut mis en évidence précédemment, il est
nécessaire d'ajouter une correction à action intégrale dans le
correcteur, qui devient alors un correcteur PI. Ce correcteur
sera dimensionné en réglant d'abord la rapidité, puis la
stabilité.
On réglera donc en premier lieu l'action proportionnelle,
puis l'action intégrale.
Réglage de la rapidité
Question
11
On rappelle quela valeur du
déphasage d'un correcteur PI une décade avant et une décade après sa
pulsation de cassure valent respectivement -85° et -5°.
Sachant que la pulsation de cassure du correcteur PI sera
positionnée une décade en amont de la pulsation de coupure de la FTBO
corrigée de la seule action proportionnelle, calculer
la valeur de la marge de phase que doit apporter le correcteur à
action proportionnelle. En déduire la valeur du gain Kp. Paramétrer
le bloc "PID" avec cette valeur.
Simuler à nouveau le comportement du système
ainsi corrigé, et relever la valeur de la nouvelle
pulsation de coupure de la FTBO.
Réglage de la stabilité
Question
12
Rappeler l'expression de la
pulsation de cassure d'un correcteur PI parallèle, en fonction de ses
coefficients Ki et Kp.
On choisit de positionner cette pulsation de cassure une décade en
amont de la pulsation de coupure. En déduire la
valeur du coefficient Ki de l'action intégrale. Paramétrer le bloc "PID" avec cette valeur, et simuler
le comportement du système avec son correcteur PI.
Conclure sur le bénéfice apporté par cette
correction et sur le respect des 4 exigences du cahier des charges.