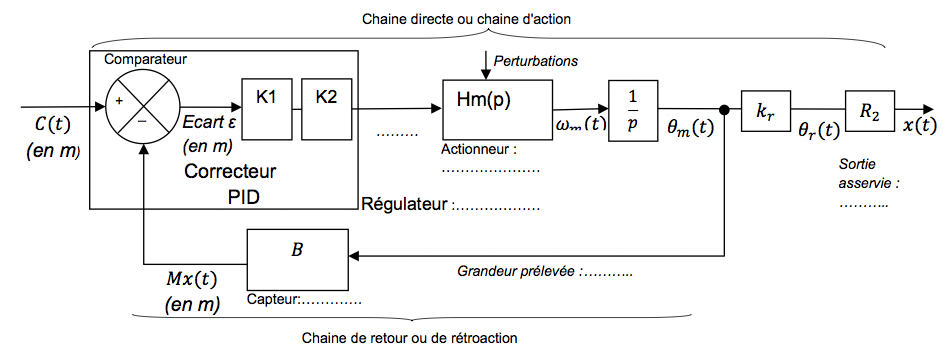
Chaîne de retour
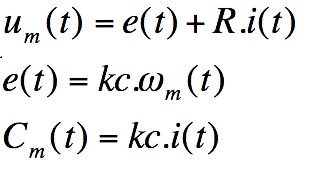
Ecriture du modèle de connaissance
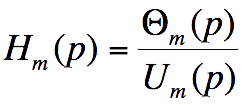
dans le domaine symbolique du moteur

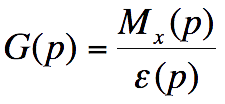
Fonction de transfert en boucle
ouverte
Précision
Rapidité

Stabilité