Présentation générale de l'axe numérique -
Activités des modélisateurs
Vous devez dans cette partie simuler la réponse indicielle et
harmonique de l'axe numérique, après avoir établi son modèle sous Matlab.
Le résultat de ce modèle doit vous permettre de quantifier les
performances de l'axe, et de juger de sa compatibilité vis-à-vis du cahier
des charges
Construction du modèle
Modèle du moteur
Vous devez
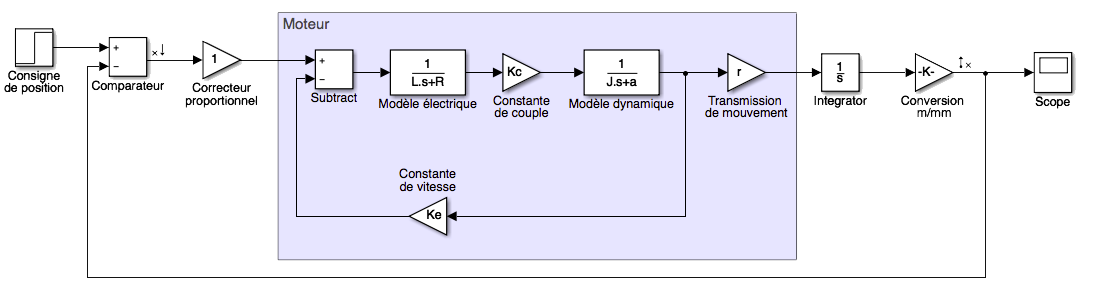
d'abord construire le modèle du moteur, sachant que son schéma bloc est le
suivant :
Ce schéma se traduit comme suit dans Matlab :
Les objets nécessaires à la construction du modèle sont disponibles grâce
à l'explorateur de bibliothèque :
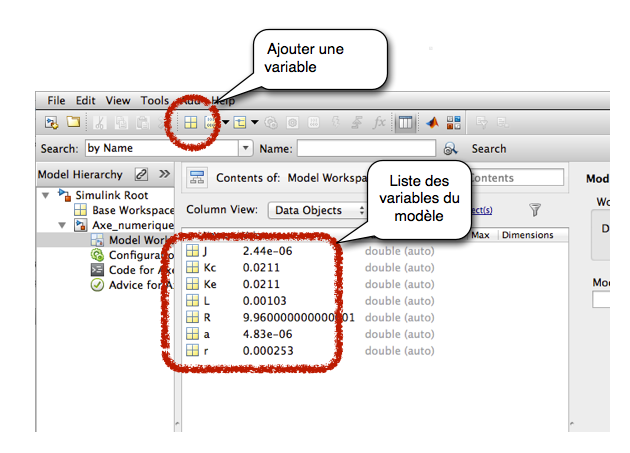
Les variables se définissent sous Matlab grâce à l'explorateur de
modèle, dans la "modélisation de l'espace de travail".
Les variables à paramétrer sont les suivantes :
Modèle de l'asservissement
L'asservissement
peut se ramener à l'insertion de du modèle précédent dans une structure à
boucle fermée à retour unitaire. Attention, la grandeur de sortie du
moteur est une position en mètre, qu'il faut rendre compatible avec la
consigne qui est en mm :
Simulation du modèle
Estimation du temps de réponse et de
la précision
Procédez à
la simulation de la réponse du système à une consigne en échelon de 30mm.
En déduire le temps de réponse à 5% et l'erreur statique, avec une
correction Kp=1
Refaire la même estimation avec Kp=4. Quelle est l'influence de ce
correcteur ?
Estimation de la stabilité
Matlab
permet de mener une analyse harmonique, et d'afficher les diagrammes de
Bode du système.
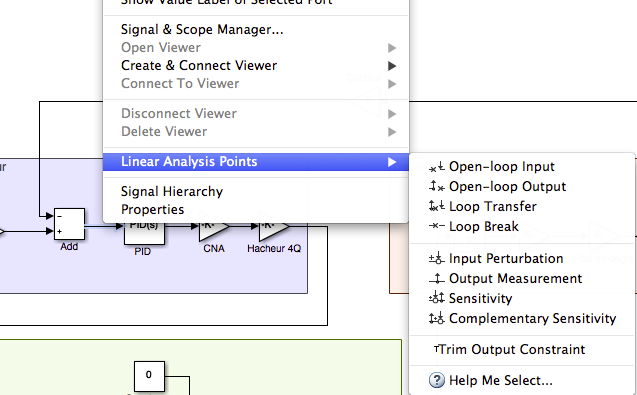
Il faut d'abord lui indiquer les points correspondant aux entrées et
sorties de la boucle ouverte : clic droit sur la branche adéquate >
Points d'Analyse linéaire > Entrée (ou sortie) de boucle ouverte (On
rappelle que la boucle ouverte est la fonction de transfert entre l'image
de la sortie et l'erreur)
Ceci étant fait, cliquer sur le menu "Analyse > Control Design >
Analyse linéaire"
Sélectionner "Diagramme de Bode"
Conclure sur la stabilité du système,
en exprimant les marges de phase et de gain

 Les objets nécessaires à la construction du modèle sont disponibles grâce
à l'explorateur de bibliothèque :
Les objets nécessaires à la construction du modèle sont disponibles grâce
à l'explorateur de bibliothèque :