TP REPONSE FREQUENTIELLE DES SYSTEMES ASSERVIS
Étude
de la cheville NAO - Activités des
modélisateurs

La cheville est constituée du pied, de la cheville et du tibia.
Le mouvement est assuré par un moteur à courant continu.


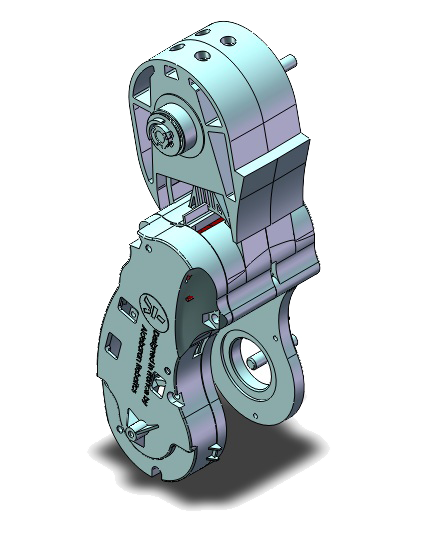
Pied Cheville
Tibia

La structure globale de l'asservissement est représentée ci-dessous :

L'objectif de votre partie est de compléter un modèle causal de la
partie "conversion d'énergie" (le moteur à courant courant continu) et de
l’asservissement avec correction proportionnelle.
En revanche, la partie "transmission de l'énergie" sera modélisée de
façon acausale, les éléments de ce modèle étant issus d'une maquette
numérique.
Construction du modèle
Le modèle ébauché est disponible
au téléchargement
Ouvrir Matlab, et ouvrez le fichier "cheville_light.slx".
Faites apparaître l'explorateur de bibliothèque (l'équivalent Matlab
des palettes sous Scilab).

Le modèle ci-dessous correspond à la forme du modèle complet auquel
vous devez aboutir (ATTENTION : dans cette image, toutes les fonctions qui
apparaissent n'ont pas les bonnes valeurs : ce sera à vous de les
renseigner !)
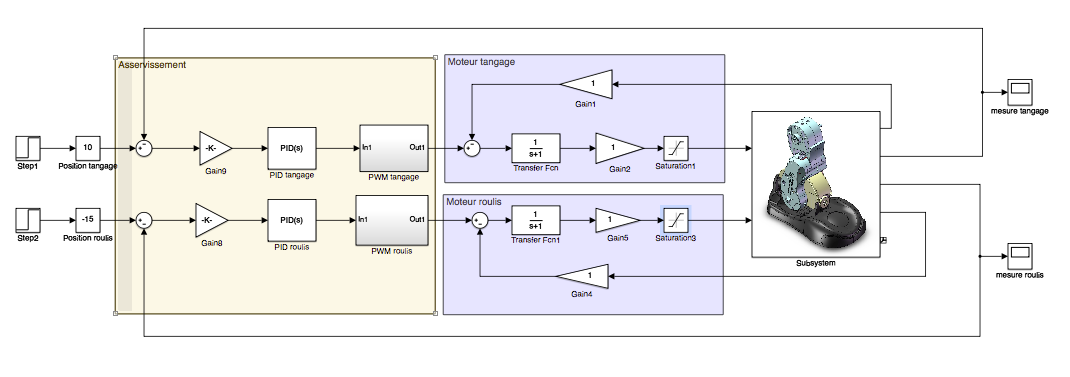
Ce modèle contient la zone relative aux asservissements, aux deux
zones correspondant aux moteurs, et à une zone relative à la modélisation
acausale du mécanisme. Elles sont toutes complétées, à l'exception de
celles des moteurs qu'il vous faudra construire.
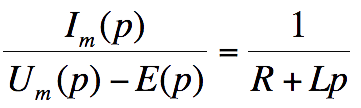
Construction du modèle causal des
moteurs
Les modèles de connaissance des deux
moteurs identiques vous sont fournies, exprimées dans le domaine
symbolique :


Par ailleurs, il faut installer une limitation du courant. Cette
limitation se modélise par un objet "saturation" dans la bibliothèque
"Simulink > Discontinuités"
Configuration des correcteurs
Afin de comparer les résultats de chacun,
il est indispensable que les paramètres de fonctionnement soient les
mêmes pour tout le monde. Il a été décidé de fixer un échelon en tangage
de 30°, avec une correction proportionnelle Kp=500
Simulation
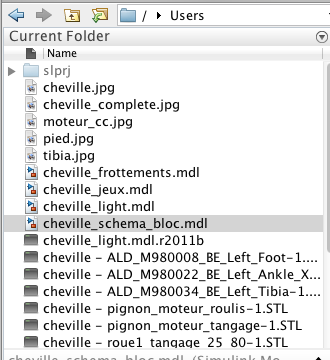
Remarque importante : il est indispensable,
pour que la visualisation de la maquette numérique soit effective, que le
répertoire de travail soit celui dans lequel se trouvent les fichiers .stl
de la simulation.
Avant de lancer la simulation, il
faut mettre à jour le diagramme. Cette action vous permettra de
visualiser le comportement de la maquette numérique de la cheville en
même temps que la simulation progresse.
Pour faire cette mise à jour, cliquer sur "Simulation > Mise à
jour" ou taper sur les touches Ctrl+D
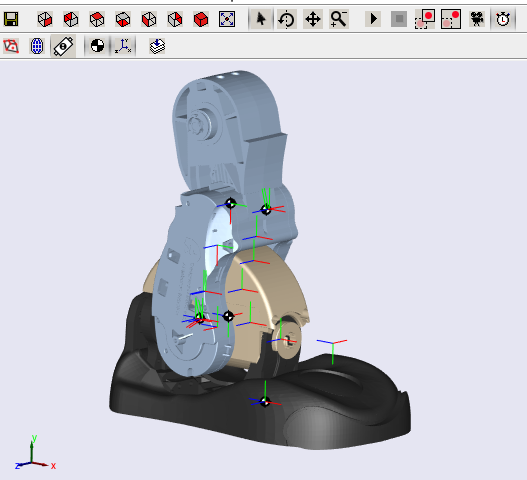
La maquette numérique s'affiche alors dans une fenêtre. Il vous est
possible de zoomer et changer d'orientation de vue avec des
manipulations de souris similaires à Solidworks.
Après avoir saisi les consignes dans votre modèle (30
en tangage et 0 en roulis) et les valeurs du correcteur
PID (Kp=500, Ki=0, Kd=0), lancez la simulation et observez
le comportement de la cheville dans la fenêtre graphique.
Enregistrement vidéo de la simulation
Il est
possible d'enregistrer au format .avi la simulation, à des fins de
compte-rendu par exemple. Il faut pour cela cliquer sur l'icône de la
caméra, ou cliquer sur le menu "Simulation > Enregistrer au format
AVI"
Conclusion
Comparez
votre résultats avec les autres membres de votre équipe.
Des écarts existent... Recherchez les causes des écarts avec
l'ensemble du groupe
FIN DE CETTE PARTIE
Haut de page