TP CORRECTION DES ASSERVISSEMENTS
Asservissement de position - Activités du
chef de projet
L'objectif de cette activité consiste à étudier les moyens d'améliorer
les performances de l'asservissement de position de tangage, en modifiant
la structure de la chaîne de retour ou de la chaîne directe.
En premier lieu, vous travaillerez sur un asservissement de position
sans boucle interne de vitesse
Puis vous insérerez un asservissement de vitesse à l'intérieur de
l'asservissement de position, afin d'en observer les bénéfices.
Asservissement de position SANS boucle interne
La position en tangage du drone exclut pour le moment un
asservissement en vitesse. Le schéma bloc ci-dessous représente la boucle
d'asservissement dans ce cas :
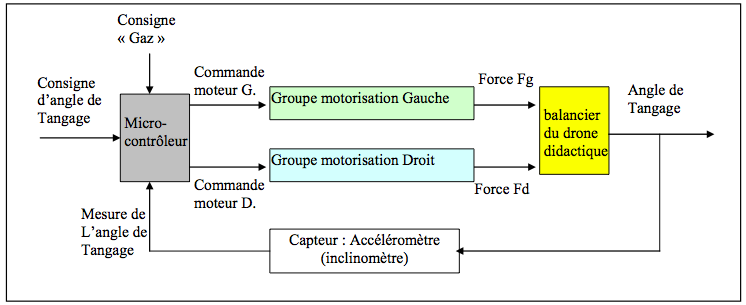
Le micro contrôleur reçoit une consigne de tangage, et va positionner le
drone en fonction de sa position réelle, mesurée par l’intermédiaire d'un
accéléromètre (capteur mesurant les accélérations dans les 3 directions)
Travail sur la boucle de retour
Étude sur la boucle de retour : signal
issu de l'accéléromètre
Le document ressource "Accéléromètre" présente le principe
d'élaboration des mesures d'accélération. L'inconvénient du capteur dans
des systèmes tels que le drone est leur sensibilité aux vibrations. Les
mesures sont alors fortement bruitées, et il est indispensable d'insérer
un filtre afin d'atténuer ce bruit parasite.
Activité
1 : Étude d'un filtre passe-bas
Construire avec Xcos de Scilab le modèle ci-dessous :

Quelle est la valeur de la constante de
temps du filtre passe-bas du 1er ordre ?
Comparer les résultats, et mesurer les temps de réponse à 5% dans
les 2 cas.
Conclure sur l'impact d'un filtre passe-bas sur le temps de réponse
de l'accéléromètre
Activité
2 : Ajout d'un gyromètre
 Afin d'améliorer la précision de la mesure de l'angle de tangage,
les concepteurs du drone ont ajouté un capteur gyroscopique : le
gyromètre, dont la fiche descriptive est disponible dans les documents
ressource. Le schéma de la mesure d'angle est alors le schéma ci-contre.
Afin d'améliorer la précision de la mesure de l'angle de tangage,
les concepteurs du drone ont ajouté un capteur gyroscopique : le
gyromètre, dont la fiche descriptive est disponible dans les documents
ressource. Le schéma de la mesure d'angle est alors le schéma ci-contre.
Un filtre passe-haut est associé à la mesure du gyromètre, afin de
supprimer la dérive lente de ce dernier, dont la fonction de transfert du
1er ordre est :

Lorsque les fréquences de coupure de ces deux filtres sont égales, on
parle alors de "filtre complémentaire".
Pour modéliser l'association des deux filtres par un filtre global
"complémentaire" du 1er ordre, on considère que :
* le gyromètre, capteur rapide, définit la constante de temps de
ce filtre complémentaire
* l'accéléromètre, capteur précis, définit le gain statique du
filtre complémentaire
D'après les documents technique, on extrait les caractéristiques
suivantes des capteurs :
* Gyromètre : Sensibilité 0,00667 V/(°/s)
Bande passante 75 Hz
* Accéléromètre Sensibilité 0,013 V/°
Bande passante 50 Hz, et filtre passe
bas 1 Hz
Donner l'expression de la fonction de
transfert du système équivalent de 1er ordre du filtre complémentaire.
Travail sur la stabilité de l'asservissement
Analyse du schéma bloc
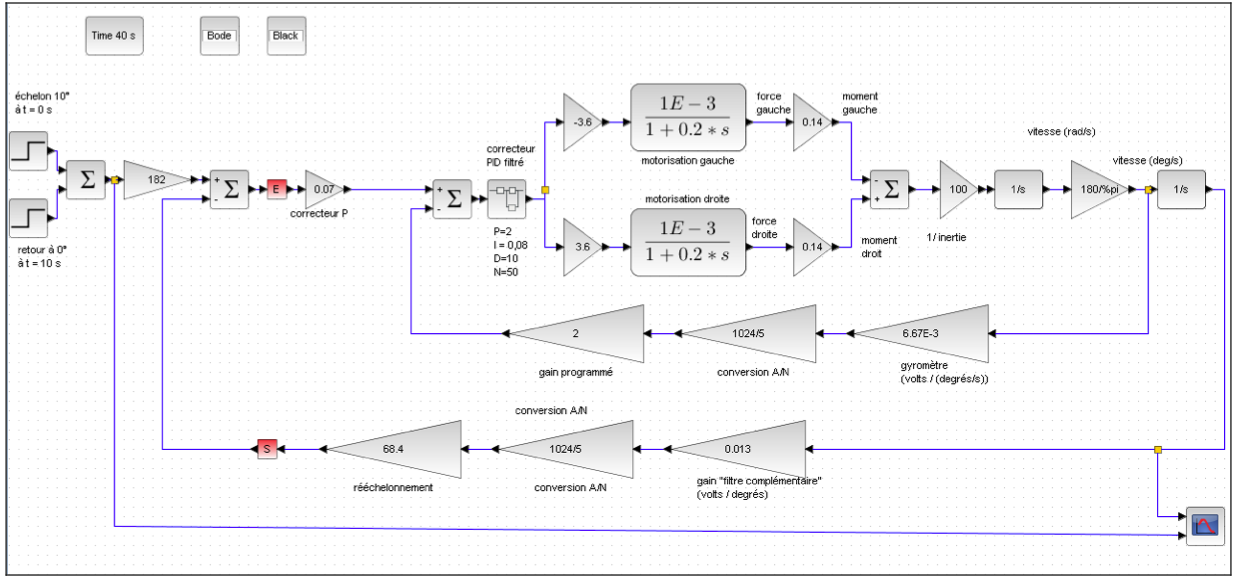
Le schéma bloc ci-dessous décrit la modélisation de l'asservissement
de position. Ce modèle
Scilab est téléchargeable

Activité
3 : Justification des blocs de la chaîne de retour
La chaîne de retour fait intervenir le filtre complémentaire, pour
lequel seul son gain a été retenu dans la modélisation.
Justifier cette simplification, au regard des constantes de temps
des composants de la chaîne directe.
Activité 4 : Analyse de la stabilité
Le modèle téléchargé est construit de telle sorte que vous
pouvez mener une analyse harmonique sans configurer le modèle.
Lancer une simulation afin d'obtenir les diagrammes de Bode.
Justifier à l'analyse des marges de phase et de gain que le
drone ne peut être utilisé avec un correcteur à action uniquement
proportionnelle
Stabilisation du système
Activité 5 : Choix
d'un correcteur
On propose d'étudier la mise en place de deux types de correcteur :
PI ou PD. Leurs diagrammes de Bode sont rappelés ci-dessous :
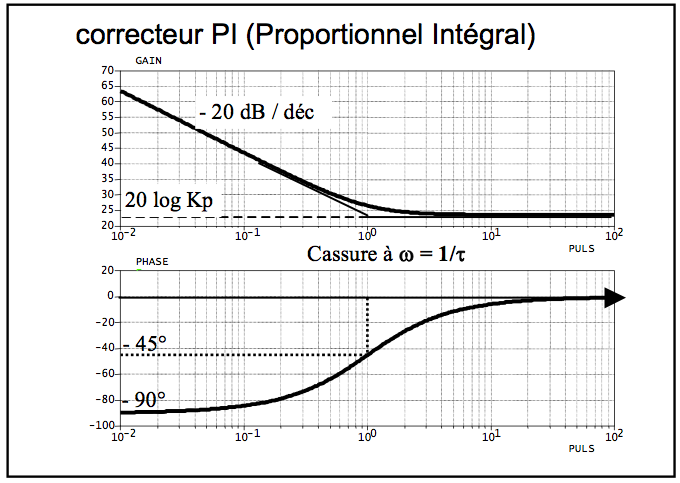
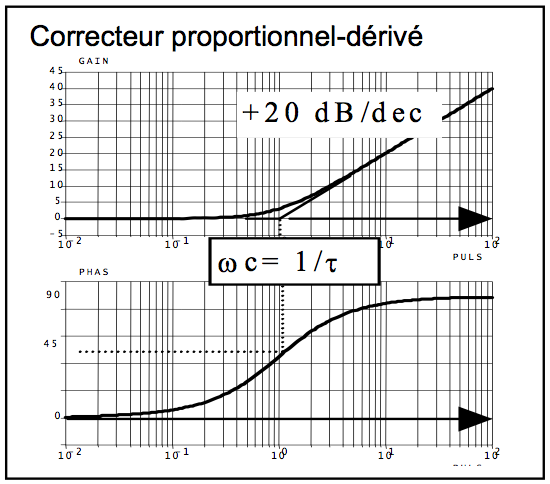
Parmi les deux correcteurs proposés,
lequel est le seul susceptible de garantir la stabilité du système ?
Asservissement de position AVEC boucle interne
Afin de rendre le système plus performant, nous allons à
présent insérer une boucle interne d'asservissement de vitesse.
L'asservissement de vitesse est étudiée et optimisée par l'équipe des
modélisateurs.
La boucle externe, de position, est corrigée par un correcteur à
action proportionnelle P, caractérisée par Kp=0,04.
La boucle interne, de vitesse, est déjà modélisée, et l'ensemble du
modèle, représenté ci-dessous, est
téléchargeable (fichier Xcos) :
Activité 6 : Mise en évidence
du bénéfice de la boucle de vitesse
Lancer une simulation.
Qu'apporte la boucle de vitesse sur
le comportement du système ?
Ajouter une perturbation afin d'évaluer la robustesse du système
face aux couples perturbateurs :
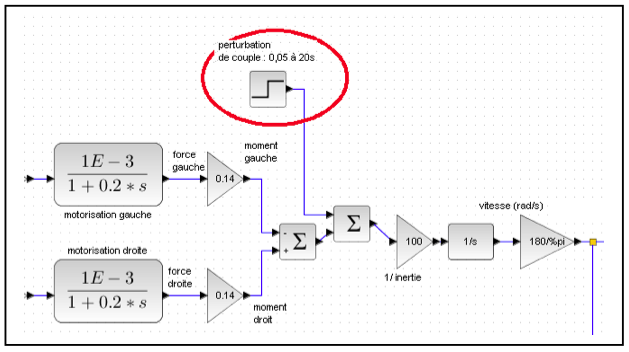
Lancer une simulation.
Le système est-il précis et robuste
en présence de couples parasites ?
Activité
7 : insertion d'un correcteur PI
Mettre en place un correcteur à action
proportionnelle-intégrale PI, dont la fonction de transfert est :
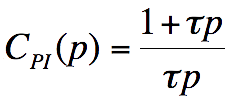
Le diagramme de Bode de correcteur est rappelé à l'activité 5.
A partir de ce diagramme, choisir une pulsation de coupure
pour ce correcteur, sans que ce dernier modifie les marges de
gain et de phase existantes.
FIN DU TP
Haut de page