TP CORRECTION DES ASSERVISSEMENTS
Asservissement de position - Activités des
expérimentateurs
L'objectif de cette activité est d'analyser et d'améliorer les
performances de l'asservissement de vitesse de tangage du drone, en
agissant sur la chaîne directe ou sur la chaîne de retour.
Il faudra observer et régler de façon expérimentale cet asservissement
de vitesse.
NB : si nécessaire, le temps de latence du port USB
doit avoir été ajusté une fois à 1 ms (Menu Démarrer > Programme >
D2C_IHM > "Change Latency" en mode administrateur)
Identification des composants du schéma bloc
L'objectif est d'identifier un modèle de comportement de
la motorisation du drone didactique.
Le document ressource "Fiche
descriptive" présente les constituants du drone, ainsi que les
grandeurs échangées entre-eux.
Le schéma bloc ci-dessous représente la boucle d'asservissement de
vitesse du drone :

Le micro contrôleur reçoit une consigne de vitesse de tangage, ainsi
que la mesure de la vitesse par l’intermédiaire d'un gyromètre (capteur
mesurant les accélérations angulaires dans les 3 directions).
Le document ressource "Gyromètre" décrit le principe de fonctionnement
de ce capteur.
Fonction de transfert de la motorisation
Le modèle de comportement de la
motorisation nécessite de commander le système en boucle ouverte, et
uniquement sur le moteur droit.
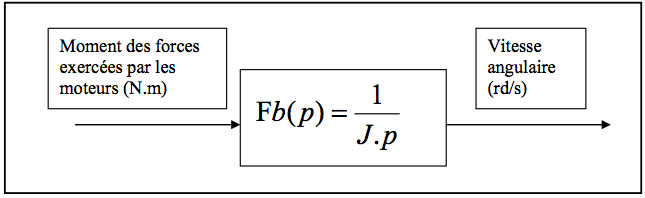
Le schéma bloc se réduit alors au schéma ci-dessous :

Ce schéma permet de visualiser la "Commande moteur" en entrée,
et la "Force de poussée" en sortie.
Activité
1 : Gain et constante de temps du modèle de comportement
Le modèle de comportement sera assimilé à un système du premier
ordre, pour lequel il va falloir déterminer son gain et sa constante de
temps.
Les traitements du micro contrôleur Arduino sont exprimés en "points"
dans l'échelle [-32767 ; +32767], correspondant à l'amplitude de codage
informatique d'un entier signé sur 15 bits.
Le document ressource "Identification MCC expérimentale" décrit
l'ensemble des procédures expérimentales de ce TP
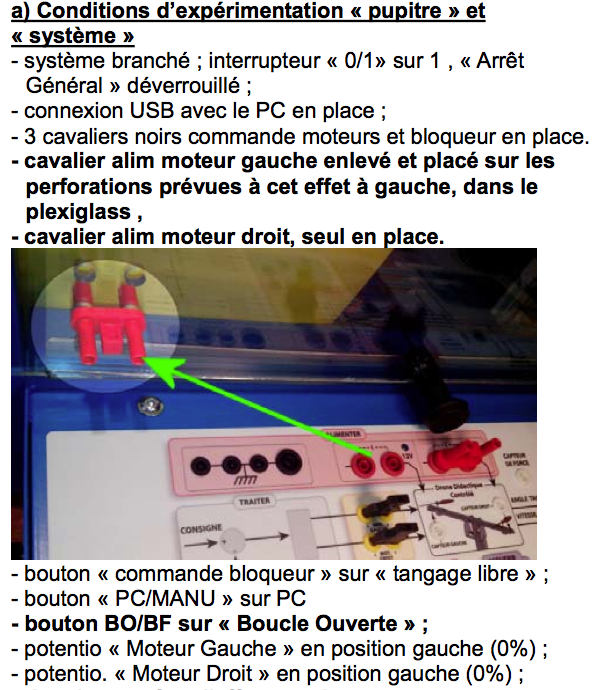
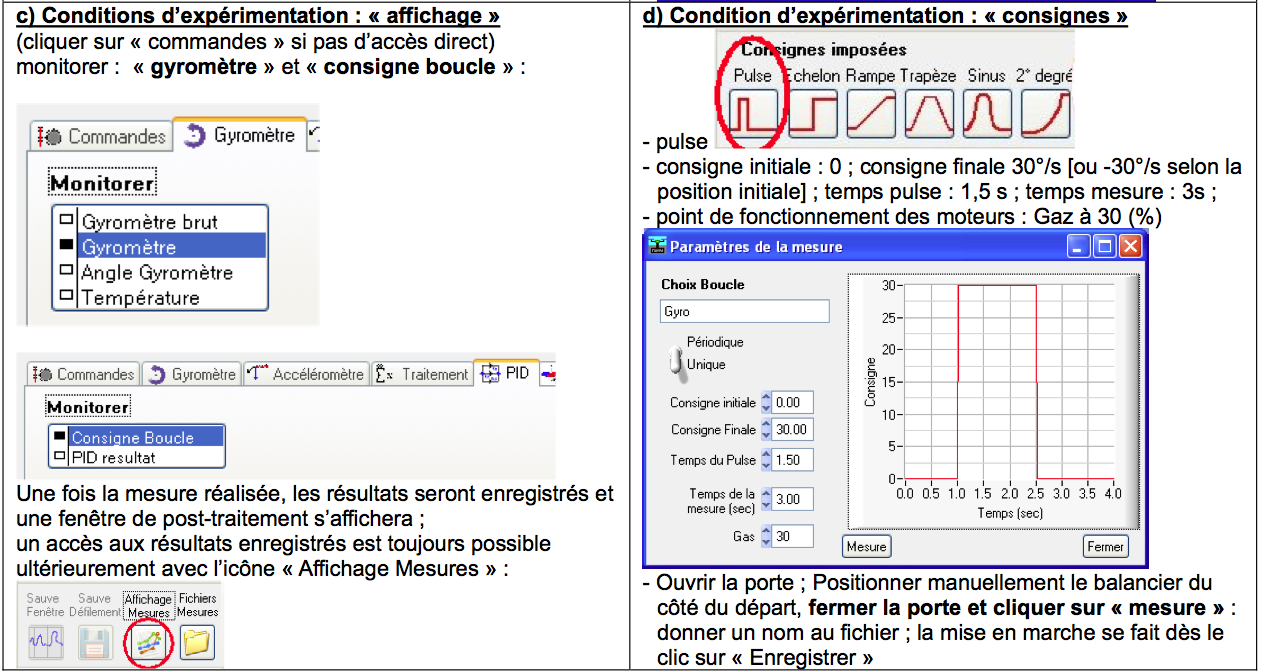
Suivre le protocole expérimental décrit
ci-dessous (extrait du document ressource cité plus haut) pour
expérimenter la réponse temporelle de la motorisation "Moteur droit"
dans les conditions suivantes :
* Point de fonctionnement "Consigne gaz" à 30%
* Échelons entre [-2% ; +2%] et [-10% ; +10%] (effectuer
plusieurs mesures et en faire une moyenne)
En déduire le gain Km (en N par points de commande)



Activité
2 : Comportement harmonique
L'activité précédente a permis
d'identifier une pulsation de coupure.
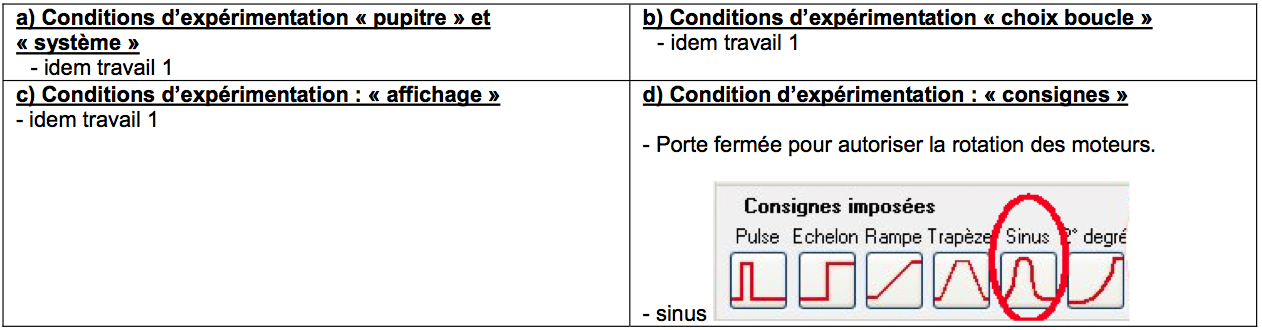
Avec les mêmes
conditions expérimentales que dans l'activité 1, expérimenter le
comportement du système en boucle ouverte, mais avec une entre
sinusoïdale dont la pulsation sera égale à la pulsation de
coupure identifiée dans le modèle de comportement.
Comparer les valeurs du déphasage attendu et le déphasage mesuré.
Proposer une explication aux écarts éventuellement identifiés.
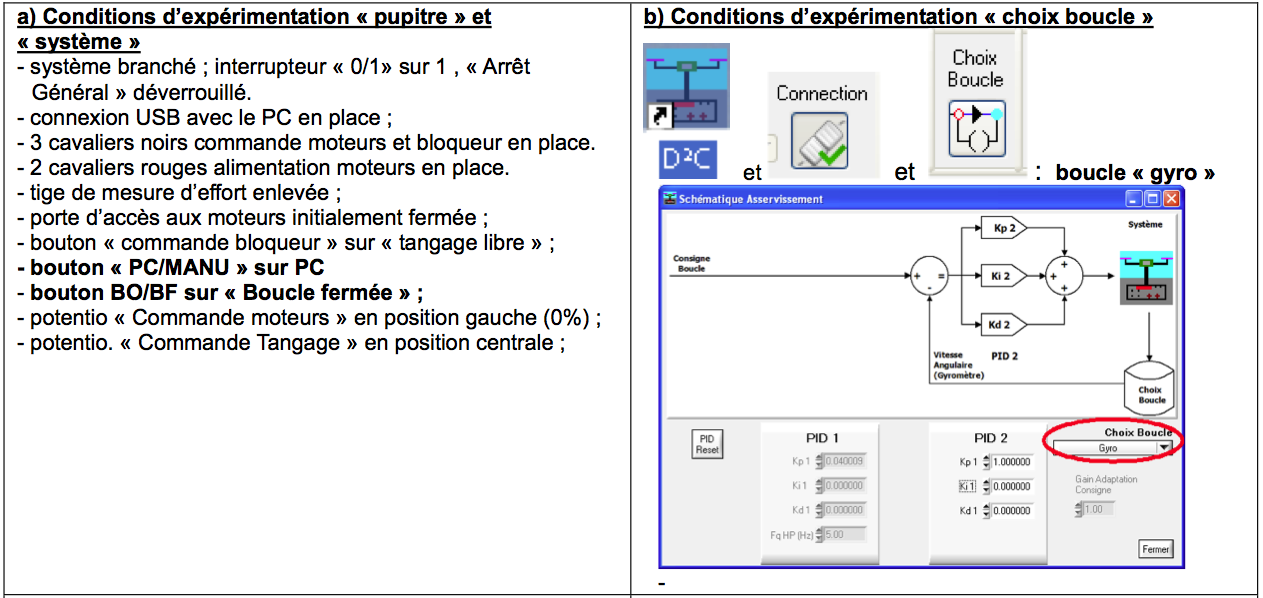
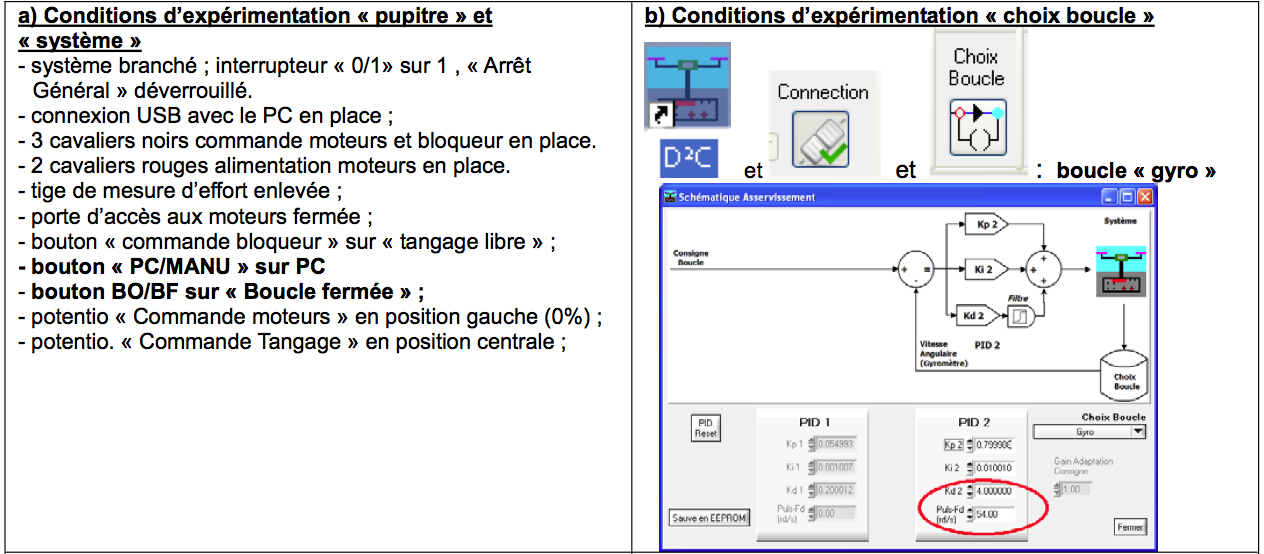
Réglage des paramètres de l'asservissement de vitesse
Validation de la fonction de transfert des composants de
l'asservissement
Le schéma bloc ci-dessous décrit une partie de
l'asservissement de vitesse des moteurs du drone :

Ce schéma appelle quelques observations :
* La commande "Consigne gaz" n'intervient pas, car elle est
considérée constante (environ 30%)
* Le schéma complet du gyromètre avec
la valeur de son gain est fourni dans le document ressource
"Gyromètre"
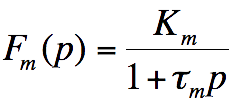
* La fonction de transfert de la motorisation seule, du 1er ordre,
est celle obtenue à l'issue de l'activité 1 :
* La partie du schéma bloc associée au balancier traduit le
Principe Fondamental de la Dynamique :
 avec J=0,01 kg.m2 et b=0,14 m
avec J=0,01 kg.m2 et b=0,14 m
Activité 3 : Fonction de transfert en
boucle fermée
Montrer
que la fonction de transfert en boucle fermée de la commande
en vitesse, lorsque PID(p)=1, a pour expression :
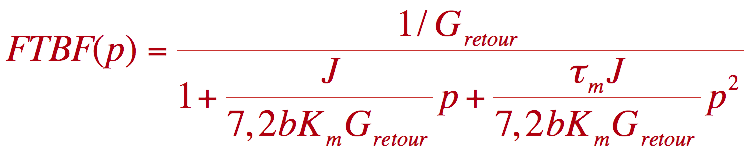
Donner l'expression du gain Gretour.
Déterminer la période propre T0 et la pseudo-période Ta
de la réponse indicielle du système.
Activité 4 : Validation de la fonction
de transfert
Expérimenter en boucle
fermée, avec Kp2=1, afin de valider la fonction de transfert
précédente
En cas d'écarts, proposer une justification.

Détermination empirique des correcteurs de la boucle de vitesse
La détermination empirique proposée dans cette partie est
adaptée de la méthode de Ziegler-Nichols vue en cours.
Activité
5 : Ajustement de l'action proportionnelle
Le réglage initial est :
Kp2=1 ; Ki2=0 ; Kd2=0 ; Puls-Fd=0
Expérimenter, dans les mêmes conditions qu'à l'activité
précédente, en augmentant progressivement la valeur de Kp2
(de 0,5 en 0,5), jusqu'à observer un comportement
oscillatoire régulier de vitesse, en limite d'instabilité.
Choisir alors un réglage final pour Kp2 légèrement
inférieur à la moitié de cette valeur limite.
Analyser la précision de vitesse obtenue avec ce
réglage. Commenter les éventuels défauts de précision
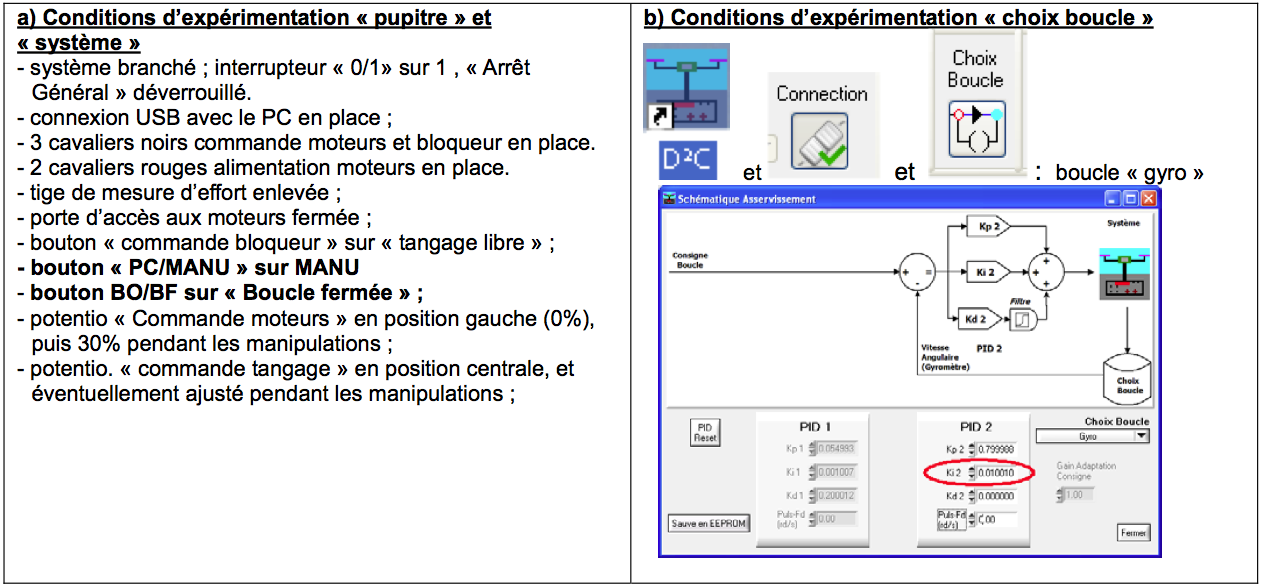
Activité 6 : Ajustement de l'action
intégrale
Le réglage précédent a
normalement du fournir une valeur de l’ordre de Kp2=0,5 à 0,8 (fonction
du type d'hélice du modèle).
Il faut à présent régler
expérimentalement le coefficient Ki2 de façon à rendre le système précis
et robuste face aux perturbations. Pour cela, il faudra générer une
perturbation avec la "tige de déstabilisation" et régler le correcteur
de façon qu'après suppression de la perturbation, le système reprenne sa
position précédente.
Augmenter progressivement Ki, par paliers de 0,0005
jusqu'à obtenir le comportement souhaité, sans
oscillations trop marquées.
Relever la valeur de Ki2 correspondant

Activité
6 : Ajustement de l'action dérivée
Les essais précédents ont
du aboutir à un réglage proche de Ki2=0,001 pour Kp2=0,5 à 0,8.
L'objectif de cette activité est de visualiser l'effet stabilisant de
l'action dérivée. En réalité, l'action dérivée est un correcteur
"dérivé-filtré" dont la pulsation de coupure du filtre est notée Puls-Fd.
On retiendra Kd2=6 et Puls-Fd=50 rad/s
Expérimenter afin de montrer l'effet stabilsiant de
l'action dérivée.
Montrer que la présence de ce correcteur permet
d'augmenter la valeur de Kp2, rendant ainsi le système
plus réactif
FIN DU TP
Haut de page