B.2.3
: Distribution de l'énergie électrique -
Activités des modélisateurs
Présentation
Le moteur retenu pour la motorisation de la pompe
hydraulique qui assure le mouvement du pilote automatique est un moteur à
courant continu.
La vitesse d'un tel moteur est directement proportionnelle à sa tension
d'alimentation. Piloter la vitesse de ce moteur revient donc
à piloter sa tension d'alimentation : c'est le rôle du hacheur.
La particularité de ce moteur est la nécessité de pouvoir être
réversible en tension (la tige doit pouvoir se déplacer dans les deux
sens), et également en courant (la tige doit pouvoir provoquer le
déplacement, ou au contraire freiner la charge)
Il faut donc trouver une solution pour pouvoir piloter un moteur dans
l'ensemble des 4 combinaisons possibles :
- 2 sens de rotation
- 2 sens de circulation du courant (soit pour accompagner le
mouvement, soit pour s'y opposer)
Principe du hacheur 1 quadrant
Le hacheur 1 quadrant a pour fonction de découper
la tension, en la transformant en forme de créneaux. Etudiez l'animation
flash ci-dessous qui permet de bien comprendre le principe d'un hacheur
(Modifiez dans l'animation les paramètres du montage pour en voir
l'influence)
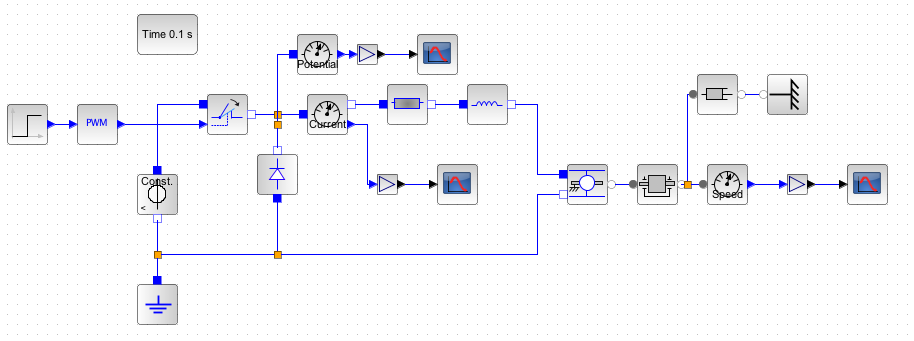
Ce hacheur est simulé sous Scilab à l'aide de ce fichier
téléchargeable : Hacheur_1Q.zcos
Ouvrir ce fichier avec Scilab, et
simuler le fonctionnement. Relevez la valeur finale de la vitesse.
L'amplitude de l'échelon configure la largeur du signal en créneau. On
appelle rapport cyclique le rapport entre la
durée du créneau et la durée totale de la période.
Modifiez ce rapport cyclique en
modifiant la valeur de l'amplitude de l'échelon (valeur 100), et
relancez la simulation. Relevez la nouvelle valeur de la vitesse finale.
Qu'en déduisez-vous ?
Modifiez à présent la valeur de la fréquence de découpage du PWM.
Initialement à 500 Hz, configurez-là à 50 Hz.
Relancez la simulation.
Qu'observez-vous ?
En conclusion, quel est le rôle du rapport cyclique ? Quelle est
l'influence de la fréquence de découpage ?
Utilisation du transistor MOSFET
La simulation précédente n'est
pas réaliste, dans le a mesure où il n'existe pas d'interrupteur
idéal commandé. Les hacheurs utilisent en réalité des transistors en
commutation : le transistor MOSFET.
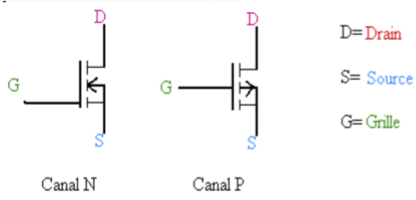
Un transistor MOSFET est un transistor
dont la fonction essentielle est d'assurer la commutation d'un signal :
il se comporte en interrupteur commandé par une tension VGS.
- Si VGS>seuil : l'interrupteur est fermé en canal N (ouvert
en canal P)
- Si VGS>seuil : l'interrupteur est
ouvert en canal N (ouvert en canal P)
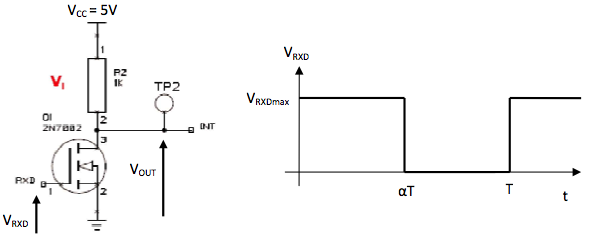
La carte de pilotage installée dans le pilote utilise le montage
ci-dessous :
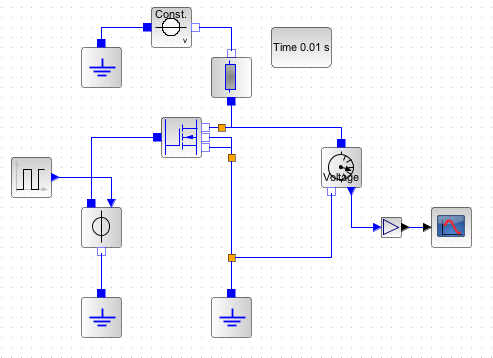
Construire sous Scilab le modèle
ci-dessous, qui modélise le montage dans la carte de commande du pilote
:
Ce modèle est en particulier composé d'une résistance de 1 ohm et d'un
transistor MOSFET canal N (palette SIMM>Electrique>Composant
avancé>Actif : "MEAS_NMOS").
Valeurs numériques :
- L'échelon du signal en créneau doit avoir une tension de 5V
(tension de seuil du transistor), et une période égale à 1/500 s (pour une
fréquence de découpage de 500 Hz)
- La tension Vcc connectée à la résistance est constante égale
à 5V
- Le transistor MOSFET est caractérisé par un gain Beta
[A/V*V] égal à 100
- La résistance est égale à 1000 ohm
Simuler le
fonctionnement de ce montage, et observer le signal de la tension de
sortie.
Principe
du hacheur 2 quadrants
Le montage précédent permet donc de faire varier la
vitesse d'un moteur à courant continu, mais en maintenant un sens unique
de rotation et une sens unique de couple.
Mais le pilote nécessite de pouvoir inverser le sens de rotation et le
sens du couple.
Nous allons donc utiliser un nouveau hacheur, appelé hacheur
4 quadrants :
La tension Um est la tension aux bornes du moteur
Vous travaillerez avec le modèle Scilab 2 quadrants (pour des
raisons de simplification de modélisation, les transistors seront
modélisés par des interrupteurs commandés) : Hacheur_2Q.zcos
Est-il possible d’obtenir avec un
montage de ce type une tension moyenne négative aux bornes du moteur
?
Dans un premier temps les transistors Q310 et Q311 ne sont pas
commandés. On ferme Q309 (donc le PWM reçoit la valeur 255), et on
fait travailler Q312 (piloté entre 0 et αT, donc avec une valeur
d'entrée du PWM inférierue à 255) entre ) en commutation avec un
rapport cyclique α. On suppose que le courant moteur est constant et
que le moteur est modélisé par une résistance Ra en série une bobine L
et un générateur E.
Simuler le modèle 2 quadrants
décrit dans Scilab, et tracer Um(t). Exprimer la valeur moyenne Um.
Les transistors Q309 et Q312 sont maintenant
bloqués, et les transistors Q310 et Q311 sont
en commutation (pilotés entre 0 et αT) avec un
rapport cyclique α=0,6.
Configurer les entrées des PWM de façon à modéliser les
hypothèses précédentes :
- Bloquer Q309 et Q312 revient à envoyer la valeur 0
dans les PWM correspondants
- Commuter Q310 et Q311 avec un rapport cyclique α=0,6
revient
à envoyer la valeur 0,6*255=153 dans les PWM
correspondants
Simuler le fonctionnement et
tracer l'allure du courant moteur et la vitesse de rotation
moteur.
Réversibilité
en tension
Bloquer cette fois dans le modèle les transistors Q310 et
Q311, et faire commuter les transistors Q309 et Q312 avec un
rapport cyclique α=0,6
Simuler le fonctionnement et
tracer l'allure du courant moteur et la vitesse de rotation
moteur.
Quelle conclusion sur la réversibilité en tension ?
Réversibilité
en courant
Ouvrir
maintenant le modèle 4 quadrants : Hacheur_4Q_Dynamo.zcos
Ce modèle simule le comportement du moteur lorsqu'on
lui applique un couple sur l'arbre moteur.
Bloquer les transistors Q309 et Q312 sont
maintenant bloqués, les transistors Q310 et
Q311 étant en commutation avec un rapport
cyclique α=0,6.
Appliquer un couple de 20 Nm sur l'arbre moteur.
Simuler
le fonctionnement et tracer l'allure du courant moteur et la
vitesse de rotation moteur.
Quelle conclusion sur la réversibilité en courant ?