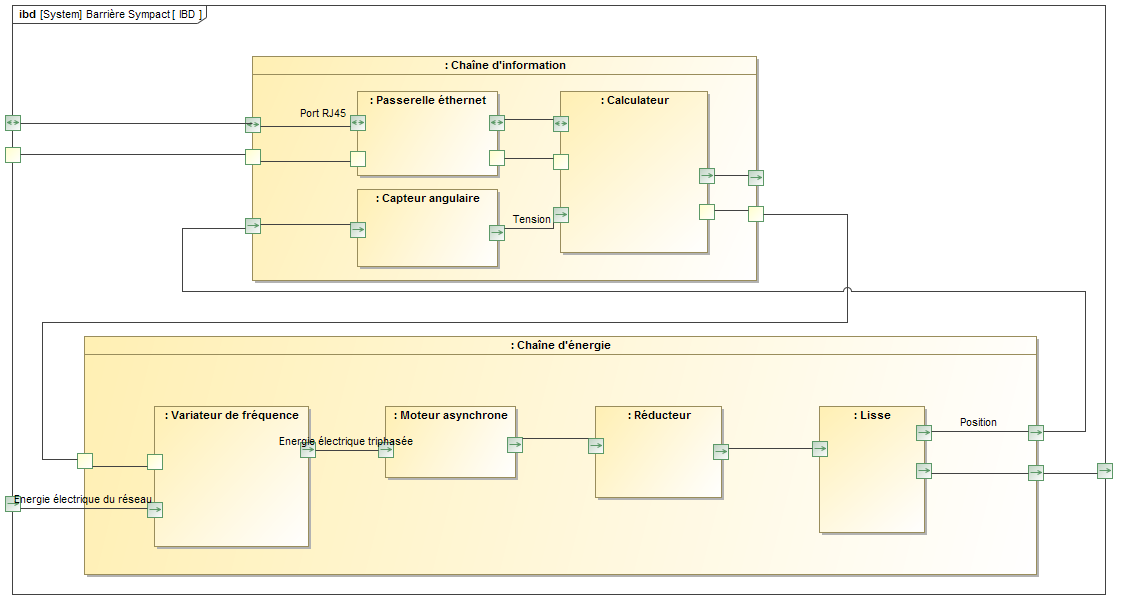
Etude
structurelle de la chaîne d'énergie et de l'asservissement
Alimentation
du moteur
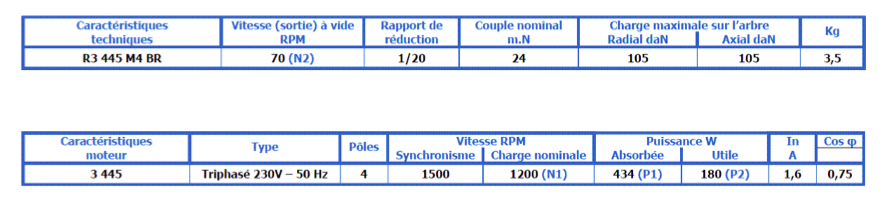
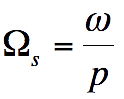
Généralités sur la modélisation du moteur asynchrone
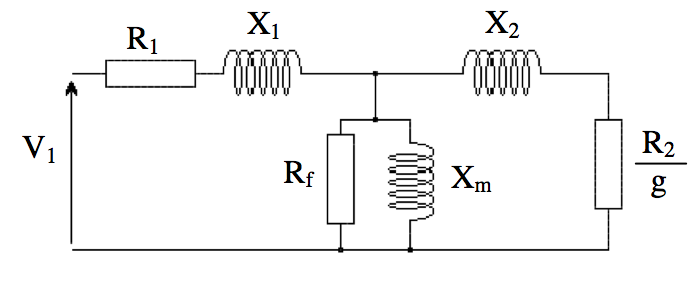
Détermination de la résistance R1 d'une bobine
Détermination des caractéristiques R2 et X2 du
rotor
 dans
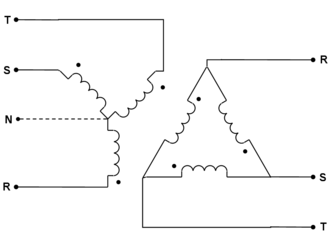
un couplage triangle
dans
un couplage triangle
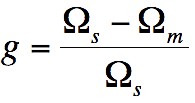
Expression générale
Simplification pour
les faibles
glissements