TP ALIMENTATION ET CINEMATIQUE DE LA BARRIERE SYMPACT
Etude de la motorisation de la barrière -
Activités des modélisateurs
Vous allez dans cette partie modéliser l'ensemble de la chaîne
d'énergie, depuis l'alimentation jusqu'au mouvement du mécanisme.
Les modèles Matlab sont disponibles ici.
Dans un premier temps, vous simulerez le comportement de la chaîne
d'énergie jusqu'à la conversion électromagnétique.
Puis vous compléterez l'étude en couplant au moteur asynchrone le
mécanisme issu de la maquette numérique
Données cinématiques et statiques
Puissance nominale du moteur
La plaque signalétique du moteur est reproduite
ci-dessous :
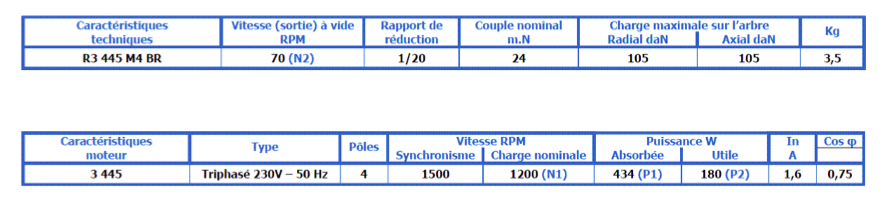
La puissance nominale d'un moteur asynchrone
est définie par le produit Pn=Vn.In (exprimée en VA)
A partir des données de la plaque signalétique, calculez la
puissance nominale de ce moteur.
La puissance mécanique utile est donnée dans la plaque
signalétique. En déduire la valeur du couple nominal de ce moteur.
Vitesse souhaitée du moteur
Le
réducteur doit tourner à la vitesse de N2/0=25 tr/mn.
En déduire la vitesse de rotation correspondante du
moteur Nm
Configuration du premier modèle acausal
Le premier modèle sur lequel vous allez travailler est
le fichier moteur.slx
Ouvrez ce fichier avec Matlab :
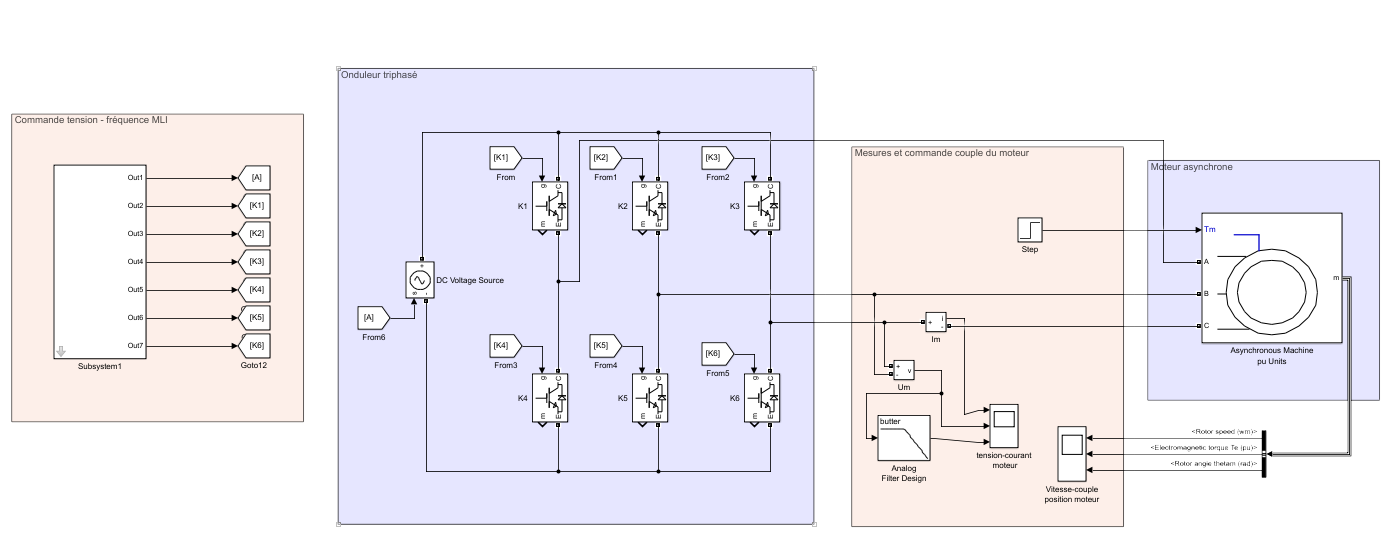
On y distingue les 4 zones suivantes :
* Elaboration des consignes d'amorçage des IGBT
* Construction du signal sinusoïdal par MLI
* Mesures
* Conversion électromécanique par moteur asynchrone
Modélisation du moteur
Le moteur asynchrone doit être mis à jour avec les valeurs
cohérentes avec le moteur de la barrière. En particulier, il faut
mettre à jour les grandeurs suivantes (dont certaines devraient
être calculées par le chef de projet)
* Résistance d'une phase du stator : 60 Ω
* Réactance de fuite du rotor : 18,1 mH
* Résistance d'une phase du rotor : 38,4 Ω
* Puissance nominale : calculée plus haut
* Tension efficace nominale : voir plaque signalétique
Fréquence de fonctionnement
Afin de
confronter la
simulation aux
valeurs
mesurées par
les
expérimentateurs,
il faut
renseigner le
modèle avec
les
caractéristiques
de
fonctionnement
réelles, à
savoir :
* la
fréquence
d'alimentation
du moteur.
* Le
couple que
doit compenser
le moteur en
régime
permanent.
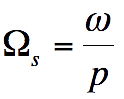
On
rappelle que
la vitesse de
synchronisme,
proche de la
vitesse de
rotation du
moteur, est
égale au
rapport (ω
désignant la
pulsation des
signaux
d'alimentation,
p le nombre de
paires de
pôles du
moteur et Ωs
la pulsation
de
synchronisme
de ce moteur)
Ω:Ω:
Calculer
la fréquence à
laquelle doit
être alimenté
le moteur pour
que la vitesse
de rotation de
ce dernier
soit égale à
la vitesse Nm
que vous avez
calculée dans
la partie
précédente.
Couple de fonctionnement
A l'issue de l'étude
cinématique, vous avez déterminé le couple à fournir en sortie du
réducteur pour initier le mouvement. En déduire le couple à fournir
sur l'arbre moteur.
Il va falloir indiquer au modèle cette valeur. ATTENTION : les
valeurs à saisir dans le modèle du moteur asynchrone doivent être des
fractions des valeurs nominales. Ainsi, si le couple nominal vaut 2 Nm
et que l'on souhaite saisir la valeur 0,5 Nm, il faudra renseigner la
valeur 0,5/2=0,25 dans le modèle du moteur.
A la lumière de cette particularité, mettre à jour la valeur de
l'échelon du couple connecté à l'entrée Tm du modèle du
moteur asynchrone
Simulation du premier modèle acausal
Paramétrez le sous-système de commande des
transistors en double cliquant dessus. Renseignez la
valeur de
la fréquence d'alimentation et la tension (400V)
Simulez le comportement du mécanisme, et relevez le temps au bout
duquel la barrière est fermée.
Confrontez ce résultat avec la valeur réelle que doivent
vous donner les expérimentateurs.
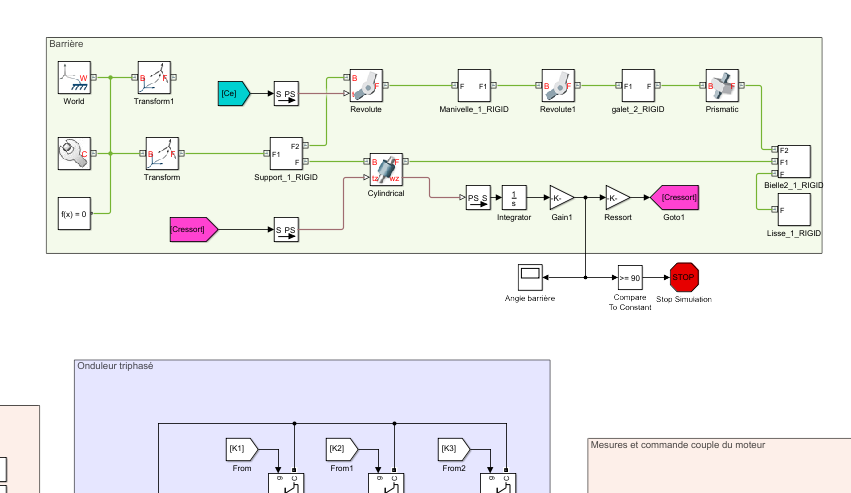
Configuration du second modèle acausal
Ouvrez à présent
le fichier Sympact.slx. Il reprend la modélisation
précédente, et ajoute une zone qui décrit les composants physiques
connectés à l'arbre moteur :
En appuyant sur les touches Ctrl+D, ou par le menu
"Simulation>Mise à jour du diagramme" apparaît le mécanisme.
Avec les mêmes paramètres que dans la partie précédente, lancez la
simulation.
Observez-vous une différence dans le résultat ? Expliquez
FIN DE CETTE PARTIE
Haut de page