Cette partie a pour objectif de :
1. Vérifier les performances de la cordeuse, et d'identifier les
causes éventuelles d'écart entre le réel et les attendus
2. Modéliser le système, et identifier les causes éventuelles
d'écart entre le modèle et le réel
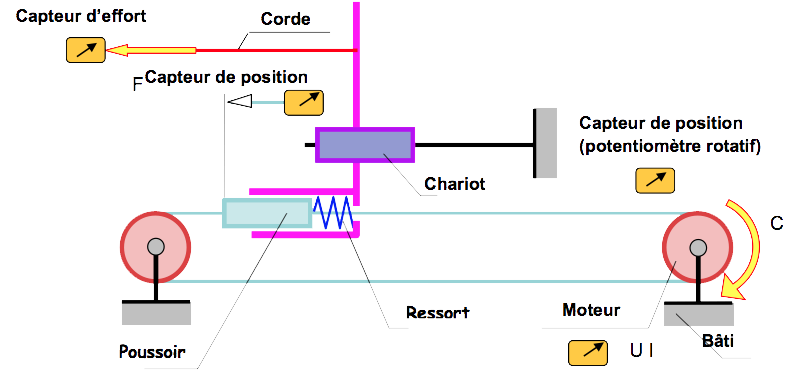
Le système de tension est schématisé ci-dessous :
Il est constitué principalement d'un moto réducteur et d'une
transmission par chaîne qui assure le déplacement du chariot portant le
mors de tirage dans lequel sera fixée la corde à tendre.
Le brin tendu de la chaîne est attaché à un poussoir en appui sur
le chariot par l’intermédiaire d’un ressort calibré. Lors de
l’opération de tension de la corde, le poussoir se déplace vers la
droite par rapport au chariot en écrasant le ressort.
C'est l'écrasement du ressort qui est mesuré par un
potentiomètre linéaire qui envoie un signal, image de la tension dans la
corde, à la carte électronique.
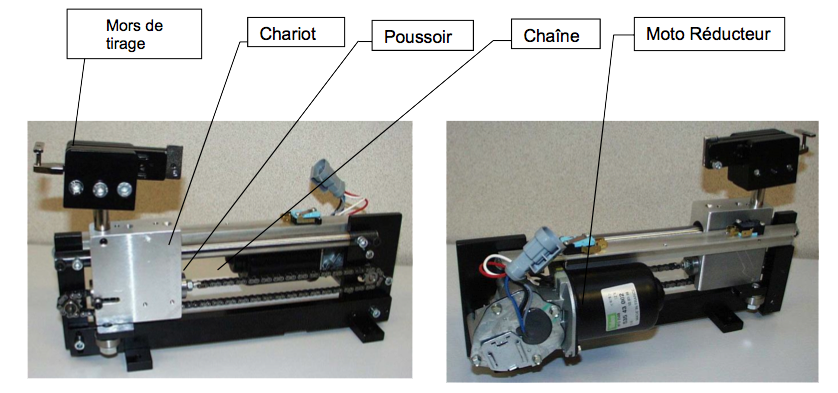
Vous avez à votre disposition le sous-ensemble de
tension, afin de l'étudier :
Répartition des tâches
Les expérimentateurs devront relever les résultats suite à une
consigne de tension de 40N, 150N et 250N. Après avoir cherché les causes
éventuelles d'écart, il leur faudra modifier le modèle causal de la
cordeuse afin de le rendre plus proche du système réel.
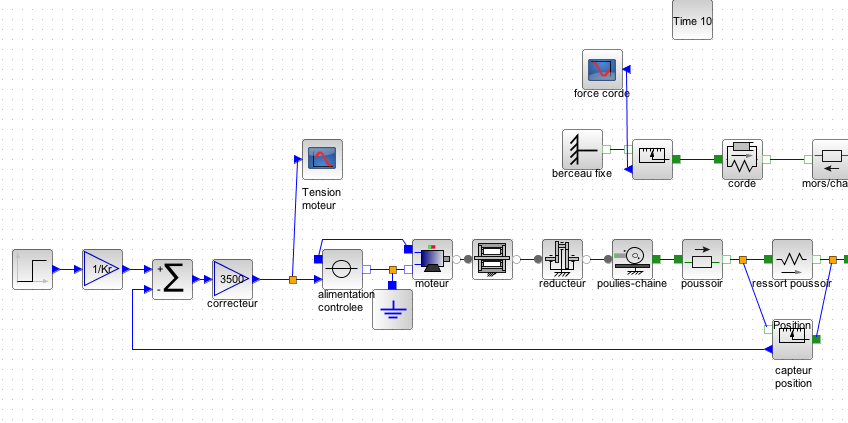
Les modélisateurs devront élaborer le modèle acausal de la cordeuse
par identification des caractéristiques des différents composants.
Le chef de projet devra quant à lui élaborer un schéma structurel de
la cordeuse, ainsi que le schéma bloc du système à partir des modèles de
connaissance.