TP ASSERVISSEMENT ET CINEMATIQUE DE LA CORDEUSE
Modélisation
comportementale - Activités des
modélisateurs
Vous devrez dans cette partie élaborer la modélisation acausale de la
cordeuse. Puis vous confronterez les résultats issus de la simulation aux
résultats expérimentaux et au modèle causal.
Pour cela, il faudra étudier la structure du mécanisme, identifier ses
constituants, et positionner leur modélisation dans le modèle acausal.
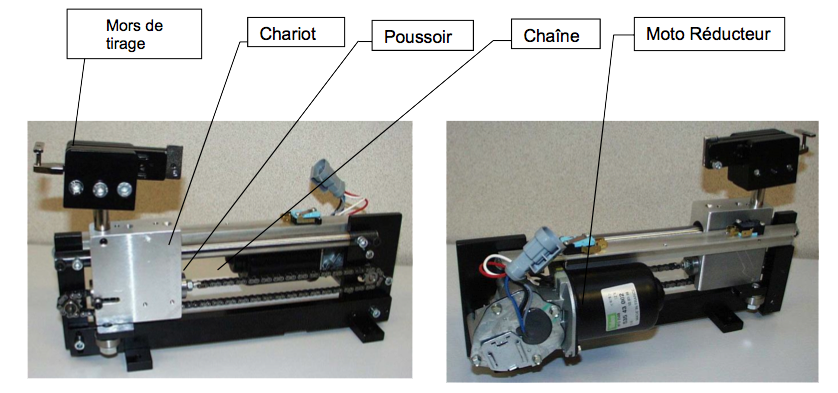
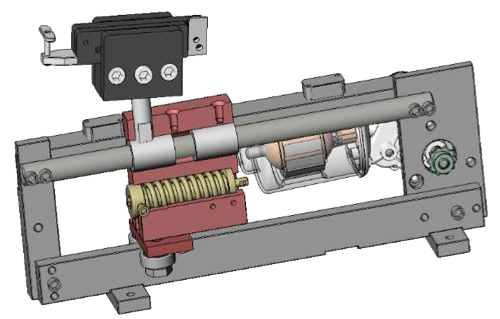
Structure du mécanisme
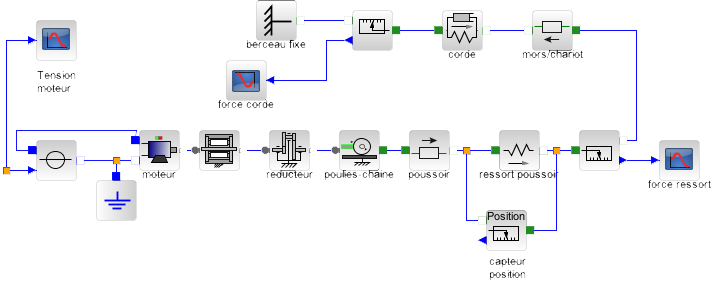
Le mécanisme de tension est schématisé ci-dessous :

Le moteur est alimenté par une tension dont la valeur est fonction de
l'écart entre la consigne de force et la mesure de la tension dans la
corde.
L'arbre de ce moteur est couplé à un réducteur, dont la sortie
entraîne un pignon. Ce pignon entraîne un poussoir par l'intermédiaire
d'une chaîne.
Le poussoir entraîne un chariot par l'intermédiaire d'un ressort
interposé.
Enfin, la corde est reliée au chariot, et le déplacement de ce chariot
va tendre la corde.
La tension dans la corde va créer un effort qui va comprimer le
ressort, proportionnellement à la force exercée. La compression du ressort
est donc représentative de la tension dans la corde.
Un capteur va mesure cette compression : il s'agit d'un potentiomètre
linéaire, dont le montage électrique va fournir une tension
proportionnelle au déplacement.
Modélisation causale de la motorisation
Ebauche du modèle
Question
1
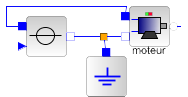
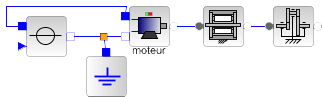
Ouvrir le logiciel Scilab, puis une fenêtre
Xcos. Vous travaillerez avec la bibliothèque SIMM.
Débuter le modèle avec la modélisation du
moteur à courant continu et de son alimentation :
 Les
éléments nécessaires sont :
Les
éléments nécessaires sont :
* un générateur de tension (Electrique>Sources)
* une référence (Electrique>Sources)
* un moteur MCC (Composants>Actionneurs)
Valeurs caractéristiques du moteur
Question
2
Les expérimentateurs doivent vous fournir les valeurs
caractéristiques du moteur : résistance d'induit, inductance,
constante électrique.
En attendant leurs résultats, configurer le moteur
avec les valeurs suivantes :
* R=1 Ω
* L=20 mH
* Ke=0,027 V/(rad/s)
Frottements dans le moteur
Il existe des frottements secs (constants) et visqueux
(proportionnels à la vitesse de rotation) dans le moteur. Ces frottements
interviennent dans l'équation suivante, issue du principe fondamental de
la dynamique en régime permanent :

où f désigne le coefficient de frottement visqueux, Cm le couple
moteur et Cres le couple résistant dû aux frottements secs.
Or le couple moteur est lié au courant moteur et à la constante
électrique par la relation

Il est donc possible, à partir de relevés expérimentaux précédents, de
calculer le couple moteur à partir de la valeur du courant.
Question
3
Demander aux expérimentateurs
une démonstration de l'utilisation de la cordeuse et du logiciel
d'acquisition.
Procéder à 3 essais à vide (sans corde), chacun
à une vitesse différente (réglable sur le pupitre de la cordeuse).
Enregistrer ces essais, afin de libérer la
cordeuse pour les expérimentateurs.
Question
4
Sur votre ordinateur, ouvrir le
logiciel de la cordeuse et charger le fichier
contenant vos résultats expérimentaux.
Ouvrir un tableur (Excel ou autre) dans lequel
il faut créer les 4 colonnes ci-dessous :
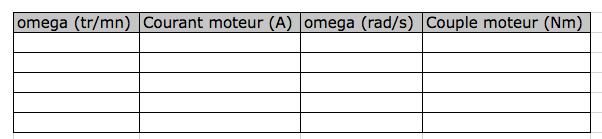
Remplir les colonnes omega (tr/mn) et Courant
moteur (A) avec vos valeurs mesurées.
Calculer les valeurs des colonnes omega (rad/s)
et Couple moteur (Nm) par des formules du tableur faisant intervenir
els valeurs mesurées.
Créer un graphique représentatif de la courbe
Couple moteur en fonction de omega (rad/s).
En déduire les valeurs de Cres et de f.
En déduire la valeur du coefficient de frottement visqueux et
de frottement sec du moteur.
Question
5
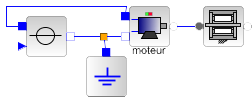
Modéliser
ces frottements par l'objet "Rotational Friction" (Mécanique>Rotation
1D>basiques), à installer dans le modèle :
Transmission
du mouvement
Réduction de la vitesse de rotation
La vitesse de rotation du moteur est réduite par
l'intermédiaire d'un réducteur à 2 étages :
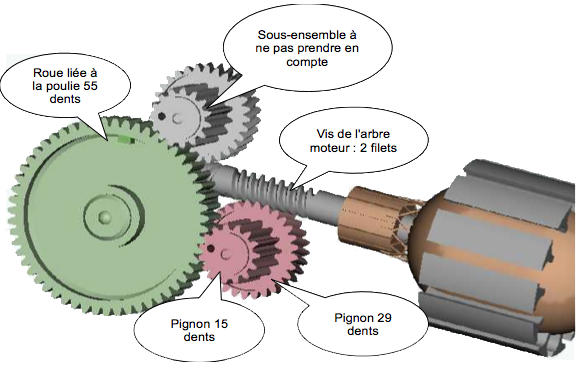
Les
nombres de dents sont de 15, 29, 55.
La vis possède 2 filets (c'est à dire deux hélices
entrelacées).
La vis liée à l'arbre moteur entraîne la première roue
dentée, dont le petit engrenage entraîne la seconde roue
dentée.
Question
6
Calculer le rapport global de réduction
:

Insérer un bloc réducteur
(Composants>Adaptateurs) et le paramétrer (ATTENTION
: le paramètre à saisir dans Scilab est le rapport de
transmission, inverse du rapport de réduction) :
Transformation de mouvement
Le
mouvement de rotation du moteur est ensuite converti en
mouvement de translation par l'intermédiaire d'un
mécanisme pignon-chaîne :
Question
7
Sachant que le rayon de la poulie est égal à Rp=10mm, donner
la relation entre l'angle de rotation  et la translation du poussoir
et la translation du poussoir 
Insérer un bloc
"IdealGear2Tgen" (Composants>Utilitaires) et le
paramétrer :

Modélisation
du ressort du poussoir
Caractéristiques du ressort
Le poussoir et son ressort doivent
être à présent modélisés : le poussoir avec sa masse, et le ressort avec
sa constante de raideur.
La détermination de la constante de raideur se fera
expérimentalement, en insérant cette fois la corde.
Question
8
Insérer une corde dans le
mors de la cordeuse et lancer une mesure
avec une tension de 15 kgf.
Faire tracer par le logiciel les
courbes d'écrasement ressort et d'effort ressort.
En déduire la relation de
proportionnalité qui existe entre l'écrasement Er et la
force Fr. Le coefficient de proportionnalité correspond
à la constante de raideur :
Modélisation du poussoir et du ressort
Question
9
Insérer
un objet "Masse"
(Mécanique>Translation 1D>Basique) et un objet
"Ressort (Mécanique>Translation
1D>Basique)
:

Paramétrer la masse avec une valeur de 0,2
kg et le ressort avec la constante que vous venez de déterminer.
Modélisation
du chariot et de la corde
Le
chariot est mis en translation
par l'intermédiaire du ressort, inséré entre le poussoir et le
chariot.
Question
10
Il vous faut à présent achever le modèle en
ajoutant :
* un objet "masse" qui modélisera la chariot, avec une
valeur égale à 1 kg
* un objet "ressort" qui modélisera la corde, avec une
constante de raideur égale à 13000 N/m
* une référence qui modélisera le bâti

Instrumentation
et pilotage du moteur
Instrumentation
Question
11
Instrumenter le modèle, en insérant :
* un capteur de force entre le ressort poussoir et le chariot
* un capteur de force entre la corde et le bâti
* un capteur de position au niveau du ressort poussoir
* un voltmètre aux bornes du moteur
Pilotage de la cordeuse
Question
12
L'asservissement est piloté par un gain proportionnel égal 3500 après
mesure de la compression du ressort.
Insérer un gain représentant ce pilotage, et compléter
le modèle conformément au modèle ci-dessous :

Comparaison
avec le réel et le modèle causal
Question
13
Simuler le modèle pour trois tensions
différentes (40N, 150N et 250N).
Confronter les résultats obtenus avec les
essais
des expérimentateurs et du chef de projet afin de confronter le
résultat de votre simulation avec les résultats expérimentaux et
les résultats issus du modèle de connaissance.
En cas d'écart, chercher les origines
possibles de ces écarts.
FIN DE CETTE PARTIE
Haut de page