Le système Maxpid
est une version didactisée des robots
préhenseurs de la société Pellenc.
Certains diagrammes
SysML vous sont proposés, qui concernent soit le robot Planeco, soit
la version didactisée d'un axe de ce robot.
Il vous est demandé de faire une analyse du robot réel, ainsi que de
la version didactisée d'un des 4 axes.
En particulier, vous vous attacherez à faire apparaître la nature
de la motorisation (type de moteur, type de commande), ainsi
que le mécanisme qui transforme la rotation de ce moteur
en rotation du bras.
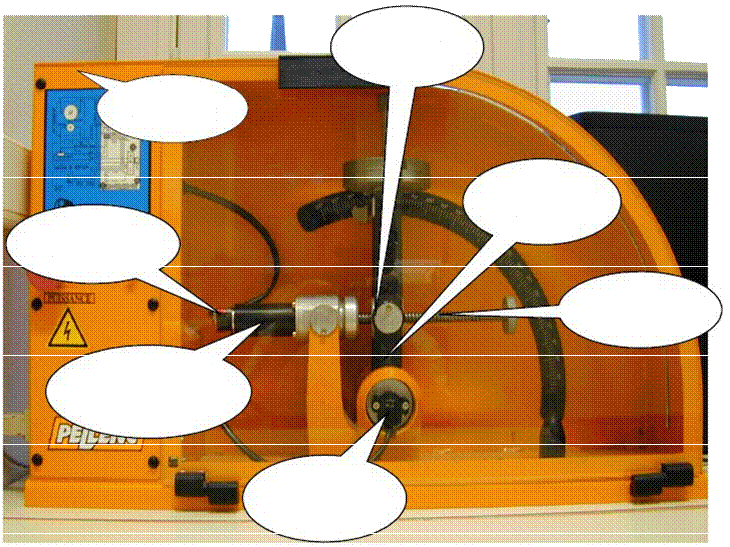
Vous compléterez la figure
ci-dessous, en indiquant l'emplacement des éléments suivants :
Chassis, Ecrou, Bras, Capteur (2), Moteur, Vis.