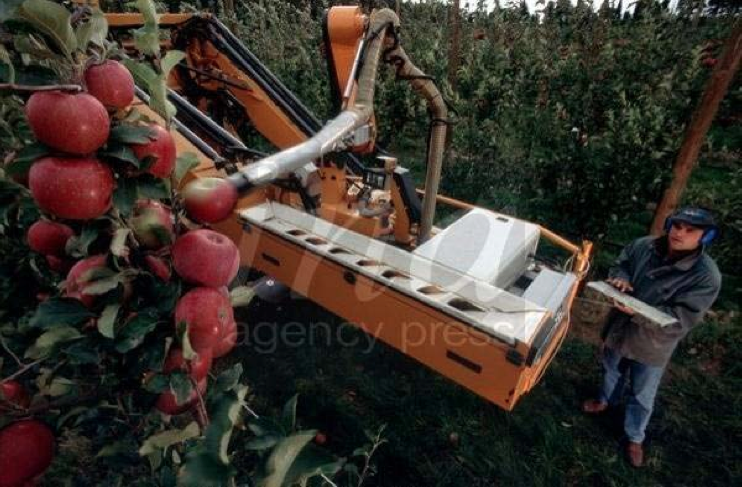
Dans les années 80, l’entreprise PELLENC spécialisée dans le
machinisme agricole décide de se lancer dans un programme de robotisation
intégrale de la récolte des pommes et des oranges.
Deux projets voient ainsi le jour :
- « MAGALI » pour la récolte des pommes
- « CITRUS » pour celle des oranges.
« MAGALI » (1985-1991) est un projet soutenu par l’ANVAR (Agence
Nationale de Valorisation de la Recherche). Il associe l’entreprise
PELLENC au CEMAGREF (Centre d'étude du Machinisme Agricole et du Génie
Rural des Eaux et Foréts) et à la SAGEM.
« CITRUS » (1987 - 1997) est un programme de recherche européen «
EUREKA », qui regroupe les mémes partenaires autour d’un organisme de
recherche public et d’une entreprise de construction mécanique basés en
Espagne.
Cette vidéo
montre un de ces robots à l'œuvre.
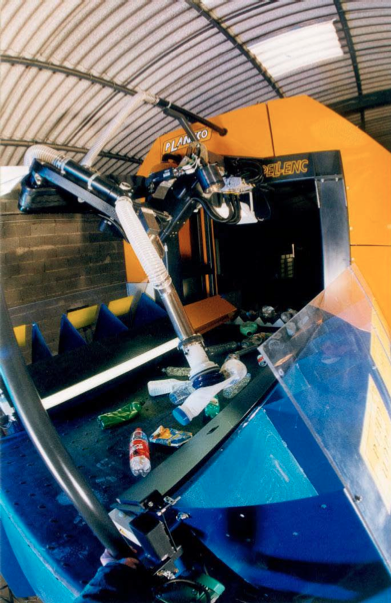
Afin de diversifier leur production, la société Pellenc a ensuite
conçu des robots spécialisés dans la préhension des déchets
dans les centres de tri : il s'agit du poste de tri "PLANECO". Coome dans
le cas des robots de récolte, une caméra haute définition est installée
sur le bras et permet de sélectionner les déchets à manipuler par le bras.
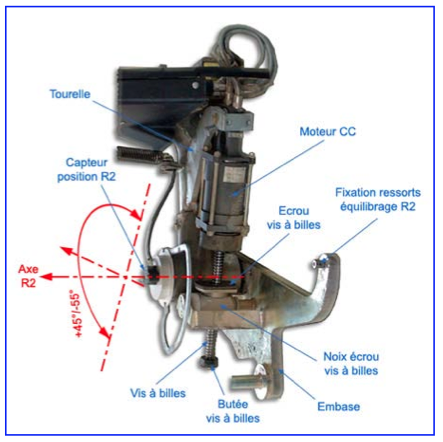
Le bras manipulateur est un robot à 4 axes, dont chacun des axes
est assuré par l'ensemble motorisé ci-dessous. C'est cet ensemble qui est
dispinible sous sa version didactisée dans le laboratoire de S2I : MAXPID
avec son moteur C.C., sa vis à billes, son écrou à billes, et ses butées.
Déroulement du TP
L'ambition de ce TP est d'étudier le mouvement de l'axe Maxpid :
distribution de l'énergie électrique en vue d'alimenter le moteur à
courant continu, et transformation de la rotation de ce moteur en rotation
du bras, par l'intermédiaire d'un système vis-écrou.
Vous constituez une équipe de 5 personnes, afin d'aborder les thèmes
suivant :
* Analyser la distribution de l'énergie électrique continue à
destination du moteur à courant continu.
* Déterminer la loi Entrée/Sortie du mécanisme.
Les activités reposent sur les démarches de l’ingénieur suivantes :
1. Distribution de l’énergie électrique vers
un moteur CC :
1.a. Déterminer les puissances transitant dans le systéme,
et comparer les résultats expérimentaux avec la simulation
1.b. Identifier le fonctionnement du hacheur
2. Loi entrée/sortie du Maxpid :
2.a. Paramétrage du mécanisme
2.b. Modélisation du mécanisme
2.c. Comparaison du résultat de la simulation avec
l'expérimentation et les calculs analytiques
Les activités sont proposées dans l'ordre dans le menu, et sont
identifiées par la nature de l'équipe : Chef de projet, Modélisateurs,
Expérimentateurs
L'exposé doit respecter les
critères suivants :
* Présentation sur support informatique
* Durée d'environ 15mn
Il doit mettre en évidence :
* la présentation du système réel et de la maquette
* la présentation de la structure du système
* les performances imposées par le cahier des charges
* la présentation des simulations et résultats
expérimentaux, et la présence ou non d'écarts
Remarques
importantes : 1. les activités d’une équipe nécessitent par moment les
résultats des autres équipes. Il est donc fondamental que le chef de
projet coordonne l’ensemble des activités
2. l’inactivité temporaire éventuelle d’une équipe doit
donner lieu à échange avec le chef de projet pour transmission des
résultats, en vue du compte-rendu