B.2.1 et B.2.4 : Distribution de l'énergie -
Activités des expérimentateurs
Cette première partie est consacrée :
- à l'étude des puissances mises en œuvre dans le Maxpid,
- et à l'étude de la conversion d'énergie qui permet d'alimenter le
moteur du Maxpid.
L'objectif
de cette partie est de mesurer les grandeurs électriques lors d'un
mouvement, et de mettre en œuvre un protocole expérimental permettant
de visualiser le comportement d'un hacheur.
Les
expérimentation se feront :
- pour des échelons de position de 0° à 60° du bras, et
inversement pour le retour,
- avec le paramétrage du correcteur suivant : Kp=100 ; Ki=0 ;
Kd=0.
Prendre connaissance des trois premières pages du
document ressource sur le Maxpid. Mettre en oeuvre le système. Relever les
valeurs de consigne, position, intensité moteur et tension moteur.
Le moteur du système Maxpid est un moteur à courant
continu, dont il faut faire varier la vitesse.
La vitesse d'un tel moteur est directement
proportionnelle à sa tension d'alimentation. Piloter la vitesse de ce
moteur revient donc à piloter sa tension
d'alimentation : c'est le rôle du hacheur, dont vous
allez expérimenter le principe de fonctionnement dans cette partie.
Le hacheur le plus simple est le hacheur
série à 1 quadrant. Il est représenté ci-dessous :
Inséré entre la source tension à valeur constante, et le moteur à
alimenter, il est constitué :
- d'un transistor, qui joue le rôle d'un interrupteur qui sera
commandé par le PWM
- d'une diode dite de "roue libre" qui a pour fonction d'éviter
la surtension aux bornes du moteur à chaque fois que le transistor ne
sera pas passant
Question
2
Etudiez l'animation flash ci-dessous qui permet de bien comprendre le
principe d'un hacheur (Modifiez dans l'animation les paramètres du
montage pour en voir l'influence)
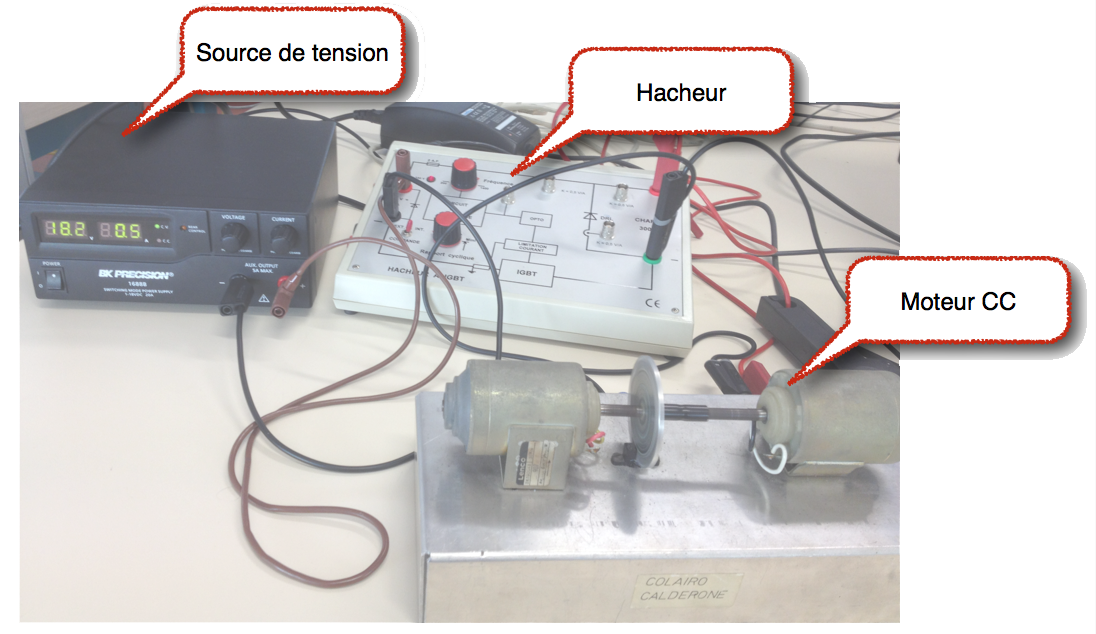
Le hacheur du Maxpid est disponible sous forme de maquette, que vous
allez expérimenter :
Matériel nécessaire : - Générateur de tension
- Maquette hacheur et moteur
CC
- Oscilloscope OX7042 (notice de mise en œuvre succincte
disponible dans les documents ressources)
- Pince ampèremétrique
- 3 câbles banane noirs, 3 câbles banane rouges
- Tachymètre RPM82
Question
3
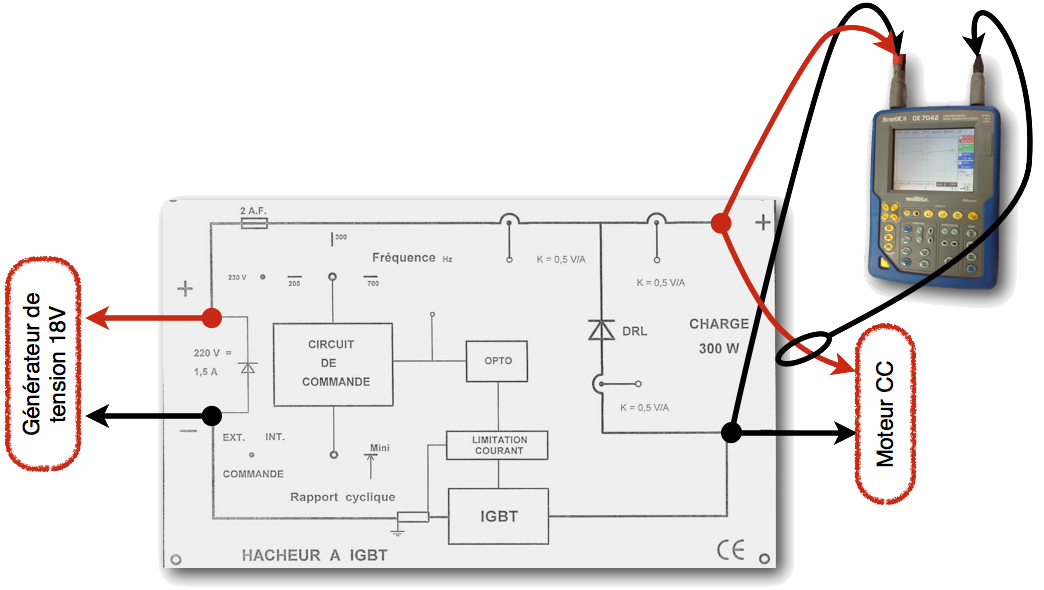
Procéder au
câblage de la maquette : Régler la pince ampèremétrique sur la sensibilité
100 mV/A. Régler l'oscilloscope de la façon suivante :
- Voies 1 et 4 en mode signal continu
- Amplitude 5V pour la voie 1
- Amplitude 100mV pour la voie 4
- Réseau en
mode DHCP (récupérer l'adresse pour la saisir dans un explorateur
internet)
Appeler
le professeur pour la validation du montage et des réglages.
Question
4
Mettre en
œuvre le protocole expérimental suivant
:
- Vérifier que tous
les interrupteurs sont en position stop.
- Vérifier que le potentiomètre du hacheur (rapport cyclique)
est en position 0.
- Mettre en marche l'alimentation continue réglée à 12V DC.
- Mettre sous tension la maquette du hacheur.
- Mettre en marche l'oscilloscope, et effectuer les réglages
nécessaires
Mettre
en fonctionnement l’ensemble {convertisseur + moteur} en
réglant la fréquence de découpage à 500Hz et en
agissant sur le réglage du rapport cyclique. Observer les signaux de tension et de
courant à l'oscilloscope. Faire des copies d'écran de l'ordinateur sur
lequel sont reportés les signaux de l'oscilloscope pour le compte-rendu.
Faire varier le rapport cyclique (à
fréquence de découpage constante), et mesurer
la vitesse de rotation avec le tachymètre. Décrire le comportement du moteur.
Faire varier la fréquence de découpage (à
rapport cyclique constant). Décrire l'influence de la fréquence de
découpage sur le comportement du moteur. La vitesse varie-t-elle ?
Conclure en résumant les influences de la
fréquence de découpage et du rapport cyclique sur la forme des signaux.
Question
5
Arrêter
le système :
- Ramener
le potentiomètre du rapport cyclique du hacheur à 0.
- Ramener les potentiomètres de l'alimentation continue à 0.
- Couper l'alimentation du hacheur.
- Couper l'alimentation continue.