B.2.3 : Distribution de l'énergie -
Activités des modélisateurs
Présentation
Le moteur retenu pour la motorisation du bras est un
moteur à courant continu.
La vitesse d'un tel moteur est directement proportionnelle à sa
tension d'alimentation. Piloter la vitesse de ce moteur revient
donc à piloter sa tension d'alimentation :
c'est le rôle du hacheur, qui assure la conversion d'une
tension continue constante en une tension continue de valeur réglable.
L'objectif de cette partie est d'étudier le principe de fonctionnement
du hacheur, et d'en modéliser son comportement.
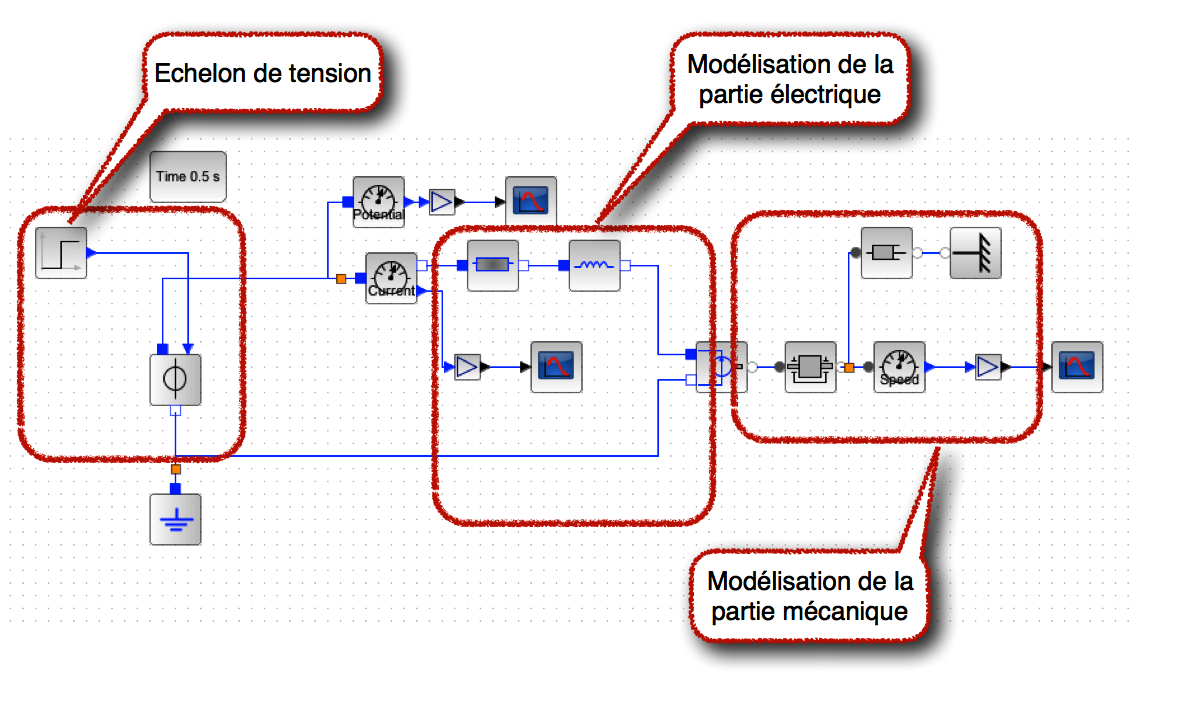
Le principe de variation de vitesse par pilotage de la
tension d'alimentation d'un moteur à courant continu 30V est modélisé par
le modèle Scilab téléchargeable
ci-dessous :
Question
1
Préciser si
ce modèle est de nature causale ou
acausale. Simuler le comportement du moteuren
appliquant différentes valeurs de consigne entre 0 et 30 V. Relever
la vitesse finale du moteur. En déduire une relation de
proportionnalité entre la tension appliquée et la vitesse stabilisée
du moteur. Calculer sa valeur, que vous exprimerez
en V.rad-1.s
En réalité, la source de tension continue est une
source de valeur fixe. Il faut donc trouver un moyen d'appliquer aux
bornes du moteur une tension moyenne réglable, bien que la tension
d'alimentation soit fixe.
Question
2
La solution la plus courante pour résoudre ce problème
est de hacher la tension, en la transformant en forme
de créneaux. Prendre connaissance du document ressource
présentant le principe du hacheur série. Etudier l'animation ci-dessous qui permet de
comprendre le principe d'un hacheur (Modifiez dans l'animation les
paramètres du montage pour en voir l'influence). Indiquer sur le compte rendu l'influence du
rapport cyclique, de la période de découpage, et de la valeur de
l'inductance.
Modulation de largeur d'impulsion
Vous allez à présent modifier le modèle Scilab proposé pour simuler le
fonctionnement réel d'un hacheur.
Le pilotage d'un hacheur se fait par
l'intermédiaire d'un PWM (Pulse Width Modulation, ou MLI comme Modulation
de Largeur d'Impulsions en français).
Son principe est le suivant :
- on génère à fréquence élevée un signal créneau de 0 (état
logique bas) à 5 V (état logique haut) dont le rapport
cyclique est variable.
- Le moteur, constitué d'une inductance, se comporte comme un
filtre qui va lisser le courant.
- Comme la période de découpage est très faible devant la
constante de temps du moteur, ce dernier ne voit à ses bornes que la tension
moyenne du signal PWM.
Question
3
Le
générateur d'impulsions PWM reçoit une information entrée codée
sur 8 bits, définissant le rapport cyclique rapport.
Ce rapport cyclique sera alors égal à : rapport=entrée/255
Ouvrir un diagramme Xcos vierge.
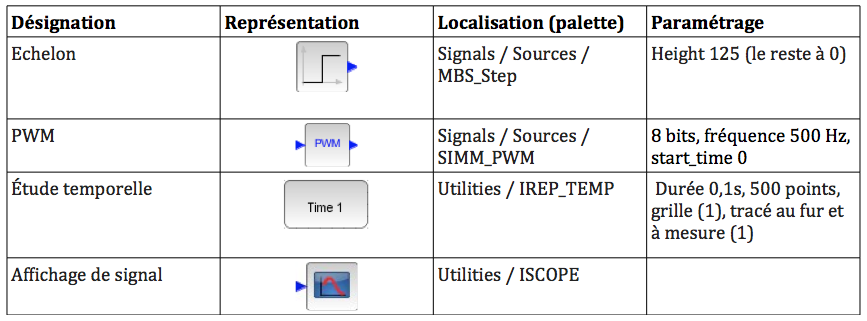
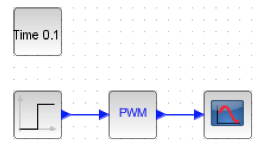
Afin de visualiser la sortie du bloc PWM, construire
le modèle Scilab élémentaire suivant :
avec ces blocs de la palette SIMM :
Simuler sur une durée de 0,1 s et observer
le signal délivré par le bloc PWM. Refaire cette simulation avec plusieurs valeurs
d'échelons. En déduire le rôle du PWM, et définir
ce qu'est un "rapport cyclique".
Modélisation d'un hacheur
Le hacheur le plus simple, que vous allez modéliser,
est le hacheur série à 1 quadrant. Il est représenté ci-dessous :
Inséré entre la source tension à valeur constante, et le moteur à
alimenter, il est constitué :
- d'un transistor, qui joue le rôle d'un interrupteur qui sera
commandé par le PWM
- d'une diode dite de "roue libre" qui a pour fonction d'éviter la
surtension aux bornes du moteur à chaque fois que le transistor ne sera
pas passant
Vous
allez dans cette partie modéliser ce hacheur afin d'étudier le
comportement du moteur connecté.
Question
4
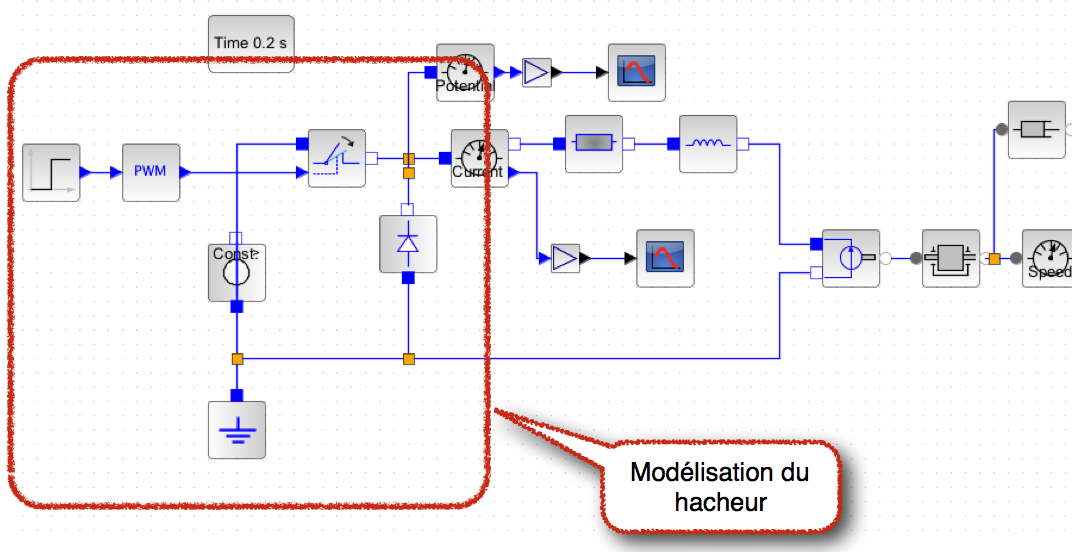
Modifier le premier modèle
Scilab comme suit, de façon à modéliser le hacheur avec sa commande
MLI :
Ce modèle contient les blocs suivants :
- un bloc PWM codé sur 8 bits avec une fréquence de découpage de
500 Hz,
- un interrupteur idéal commandé (palette
SIMM>Electrique>Composants basiques>Passif)
- une diode idéale (même bibliothèque)
Paramétrer l'échelon de commande du PWM avec une
valeur égale à 120.
Calculer
la valeur du rapport cyclique correspondant.
Simuler le
fonctionnement de l'ensemble. Relever la vitesse de
rotation du moteur.
Diviser à présent par 2 la valeur de
l'échelon. Calculer la nouvelle valeur du rapport
cyclique, puis relancer la simulation. Relever la nouvelle valeur de la vitesse du
moteur.
Commenter ces résultats, et conclure
sur le rôle du rapport cyclique.
Question
5
On souhaite enfin que la vitesse de rotation du moteur soit égale
à 100 tr/mn. Calculer la rapport cyclique à prévoir. Entrer
cette valeur dans le PWM, et lancer la simulation pour
confirmer votre calcul.
Influence
de la fréquence de hachage
Nous allons dans cette dernière
partie découvrir l'influence de la fréquence de hachage sur le
comportement du moteur. L'étude se fera avec un rapport cyclique cette
fois égal à 80%.
Question
6
Modifier
les caractéristiques du PWM de façon à ce que sa fréquence de hachage
soit maintenant égale à 50Hz. Modifier ensuite la valeur de l'échelon de façon à
ce que sa valeur corresponde au rapport cyclique voulu.
Simuler le fonctionnement du hacheur. Commenter
l'allure du courant.
La vitesse finale a-t-elle changé ?
Conclure sur l'influence du rapport cyclique et de
la fréquence de découpage sur le comportement du hacheur et sur le
comportement du moteur.
 avec ces blocs de la palette SIMM :
avec ces blocs de la palette SIMM :