TP ASSERVISSEMENT ET CINEMATIQUE DU COMAX
Étude de l'asservissement en effort -
Activités du chef de projet
Les diagrammes SysML sont disponibles dans les documents ressource.
La lecture de ces diagrammes, en particulier le diagramme de
définition de blocs et le diagramme de blocs internes de la boucle
collaborative montre que la frontière de l’étude n’englobe pas
l’utilisateur
L’utilisateur, à l'extérieur du système, transmet donc un effort sur
la poignée. Dans cette hypothèse, le système muni de la boucle
collaborative peut être modélisé par un système asservi en effort,
comme le décrit le schéma bloc ci-dessous, dans lequel les variables
suivantes sont utilisées :
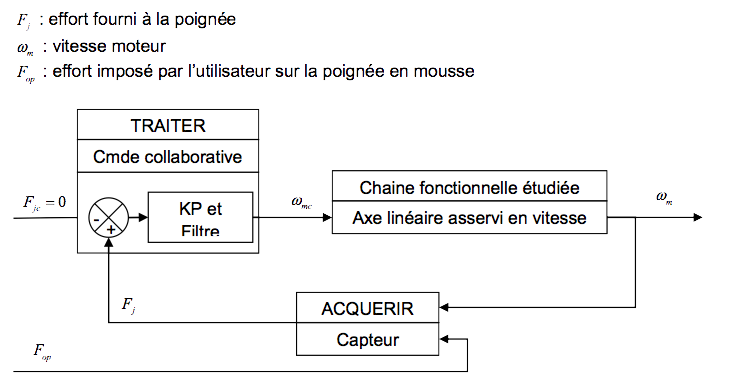
Mesure de l'effort
Question
1
A partir du logiciel "Comax environnement", identifier
l’élément qui permet de réaliser la mesure de l’effort de
l’utilisateur sur la poignée.
Préciser sa sensibilité ainsi que l’effort
maximal mesurable.
Dans la suite de ce TP, nous étudierons uniquement l’axe
linéaire asservi en vitesse dans le cadre des performances
souhaitées de la commande collaborative. La consigne de l’asservissement
étudié désormais devient donc la vitesse de rotation du moteur à
courant continu, consigne qui est en fait la sortie du bloc "Commande
collaborative".
Analyse structurelle du système asservi
Question
2
En vous aidant du diagramme de
blocs internes fourni, compléter le schéma
ci-dessous en indiquant pour chaque bloc :
* dans la partie supérieure, la fonction générique du
constituant (agir, alimenter, convertir, moduler,
transmettre, stocker, acquérir, coder,
communiquer, mémoriser, restituer, traiter)
* dans la partie inférieure, le nom du constituant proprement
dit.
Localiser les différents constituants de la
chaîne d’énergie et de la chaîne d’information de ce schéma sur le
système, en vous aidant du synoptique de l’environnement du Comax.
Modélisation de l'asservissement en vitesse
Le moteur à courant continu est commandé par un asservissement de
courant.
Nous supposerons ici que cet asservissement de courant peut être
considéré comme parfait, afin de simplifier l’étude de l’asservissement
en vitesse proprement dit.
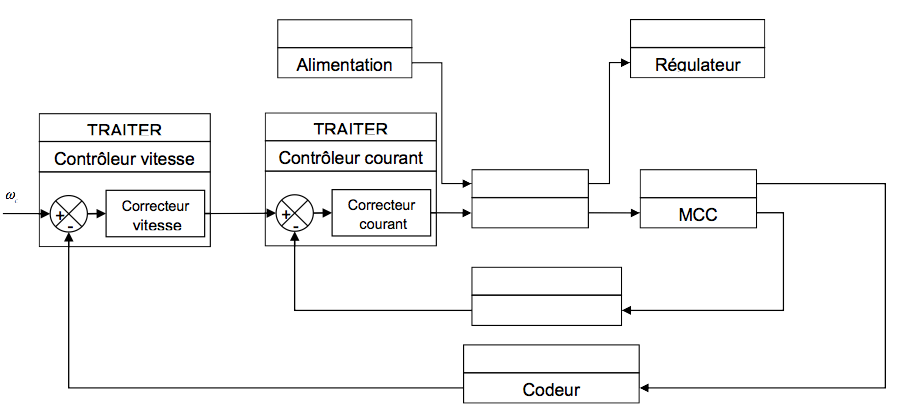
Construction du schéma bloc
Question
3
Le schéma
bloc de l’asservissement de vitesse est donné ci-dessous :

Cv(p) représente le bloc
correcteur de la consigne de vitesse ωc
qui génère la consigne de courant Ic
C1(p) est un correcteur de
courant.
Ecrire les équations du moteur à courant
continu dans le domaine de Laplace.
En déduire les fonctions de transfert à
compléter dans le schéma bloc ci-dessus.
FIN DE CETTE PARTIE
Haut
de page