TP ASSERVISSEMENT ET CINEMATIQUE DU COMAX
Étude de l'asservissement en effort -
Activités des expérimentateurs
L'objectif de cette partie est de prendre
connaissance du système afin de mettre en œuvre une série
d'expérimentations, qui permettront au chef de projet et aux
modélisateurs de valider leurs modèles.
La notice succincte du Comax est un document vous permettant
d'appréhender la mise en service du bras, ainsi que les méthodes
d'acquisition.
Lire ce document avant toute manipulation.
Test du mode collaboratif
Question
1
Mettre en service le bras Comax : mise
en énergie, connexion et activation.
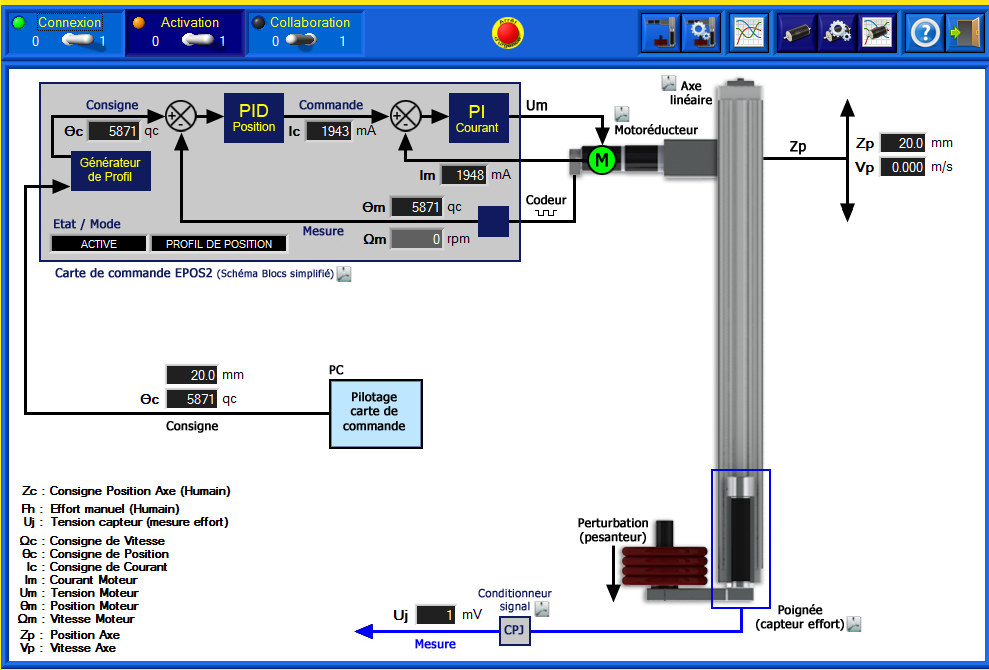
Le bras étant en position basse, sans
masses, ne pas actionner le mode collaboratif.
Relever la valeur du courant moteur mesuré.
Positionner 2 masses de 1kg sur le bras, et
relever la nouvelle valeur du courant moteur.
Positionner 2 masses supplémentaires, et relever
la nouvelle valeur du courant moteur.
Conclure.
Question
2
Enlever les 4 masses, et
activer le mode collaboratif.
Tester le
comportement de l’axe lors d’une action sur la poignée sans
aucun poids.
Placer alors 4 masses supplémentaires de 1 kg sur
le support de masse et tester à nouveau le
comportement collaboratif.
L’ajout de masses additionnelles influe-t-il sur les performances de
la boucle collaborative du robot ?
La sensation ressentie par l’utilisateur est-elle modifiée ?
Etude de l'asservissement de vitesse du Comax
Question
3
Préparer le protocole expérimental, en
saisissant une période d'acquisition de 8 ms dans la
fenêtre de l'essai (ceci permet de procéder à un essai d'environ 1
seconde).
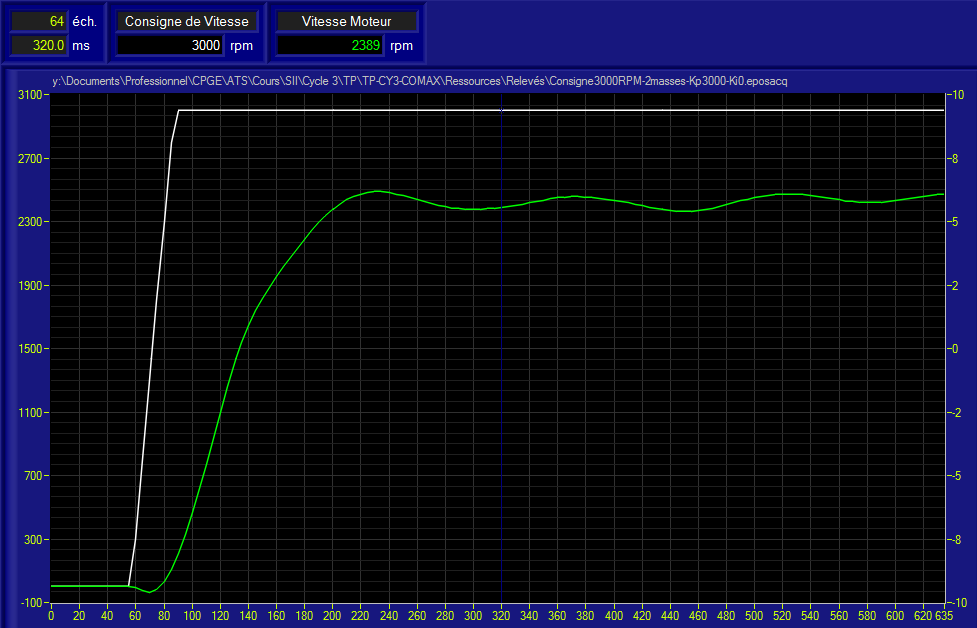
Réaliser les acquisitions
suivantes avec 0 masses, puis 2 masses et enfin 4 masses sur le
support de masses :
* Kp=3000
* Bras positionné en butée basse, échelon de +3000 tr/mn
* Bras positionné en butée haute, échelon de -3000 tr/mn
Enregistrer chacun de ces essais, de façon à
pouvoir les exploiter dans la suite du TP (icône "Sauver").
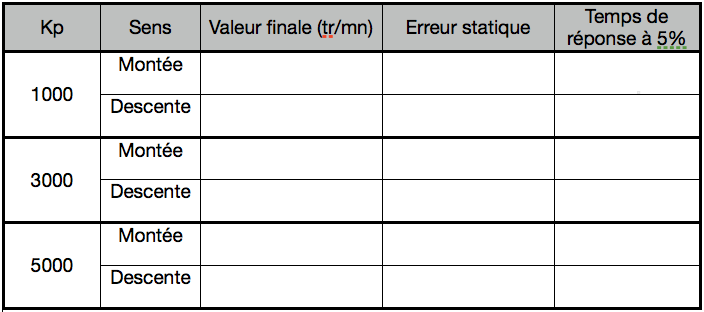
Compléter alors le tableau
ci-dessous :
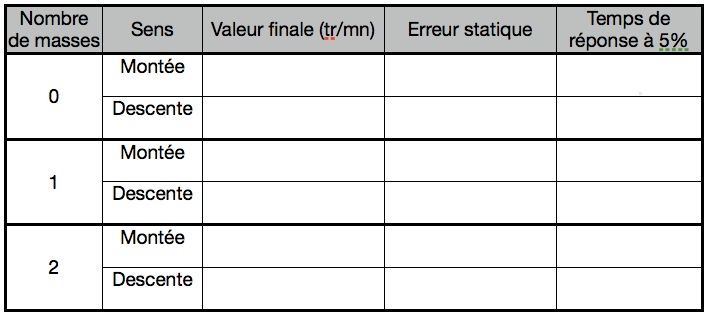
Indiquer quelle est la performance (Stabilité,
Rapidité ou Précision) essentiellement
affectée par l’ajout des masses additionnelles ?
Préciser la cause de cette variation ?
Enregistrement et traitement des mesures
Les modélisateurs auront besoin de deux relevés expérimentaux, avec
2 masses sur le bras :
* Réponse à une consigne de vitesse de 3000 tr/mn
* Réponse à une consigne de vitesse de -3000 tr/mn
Les courbes que vous devez fournir aux expérimentateurs sont la
consigne de vitesse et la réponse du système.
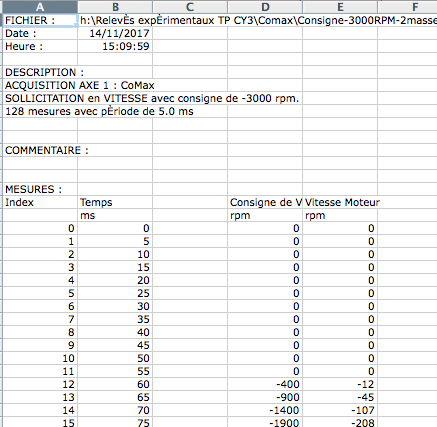
Vous avez enregistré à la question 1
l'ensemble des résultats de vos essais. A chaque enregistrement, le
logiciel crée 2 fichiers : un avec une extension .eposacq,
l'autre avec une extension .csv.
Vous devez à présent manipuler ces fichiers afin de fournir un
fichier exploitable par les modélisateurs
Question
4
Ouvrir
dans Excell le fichier avec l'extension .csv :
Il va falloir faire quelques manipulations sur ce fichier avant de
pouvoir l'exploiter sous Scilab :
* Supprimer toutes les lignes d'en-tête
(normalement, les 16 premières lignes)
* Supprimer les dernières lignes après mesures :
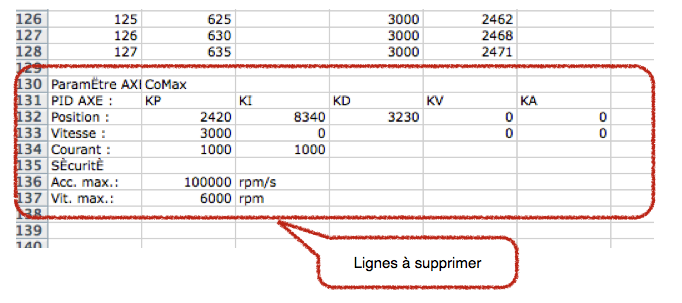
* Identifier les numéros de colonne qui
contiennent le temps (en ms) et la vitesse moteur (en rpm) - Normalement
les colonnes 2 et 5...
Enregistrer le fichier au format CSV (séparateur :
point-virgule).
Manipulation informatique
Vous allez à présent manipuler ce fichier, de façon à
délivrer aux modélisateurs un fichier .csv qui ne contiendra que
3 colonnes : une première avec le temps en secondes, la seconde avec la
vitesse de rotation en tr/mn. Vous traiterez ceci avec la console Scilab ;
il s'agit du même type de manipulations que celles vues en TP
d'informatique.
Question
5
 Ouvrir Scilab.
Ouvrir Scilab.
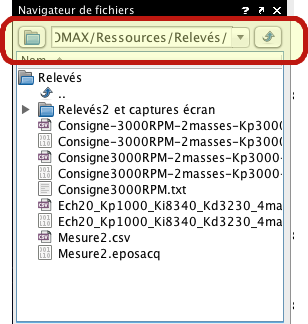
Positionner le répertoire de travail de Scilab
(dans le navigateur de fichier) dans le répertoire où ont été
enregistrés les fichiers des expérimentations.
Dans la console Scilab :
* Charger le fichier de mesure .csv
dans une variable mesure_brute
-->mesure_brute=csvRead('Nom_du_fichier.csv'
, ';' , ',' , 'double');
* En extraire les 2 vecteurs colonne du temps
(variable temps) et du signal (variable signal)
-->temps=mesure_brute(:,Numéro_de_colonne_du_temps)*1e-3;
-->signal=mesure_brute(:,Numéro_de_colonne_de_la_mesure);
* Construire une matrice à 2 colonnes dont la
1ère colonne est le temps en secondes, et la 2de colonne le signal.
Cette matrice s'appellera mesure1
-->mesure1=[temps
signal];
* Enregistrer enfin cette matrice dans un
fichier Experience1.csv que vous fournirez aux modélisateurs
-->csvWrite(mesure1,'Experience1_Scilab.csv');
Procéder de même avec la seconde mesure, et
fournir tous les fichiers aux modélisateurs (les fichiers d'origine .eposacq
et .csv ainsi que les fichiers .csv que vous venez
de créer).
Influence du coefficient Kp
On cherche à présent à identifier l'influence du gain Kp sur le
comportement du bras. A cet effet, il faudra mener plusieurs essais avec 3
valeurs différentes de Kp.
Question
6
En conservant 2
masses additionnelles sur le support de masses, réaliser les
mêmes acquisitions mais en réglant Kp (correcteur de
l’asservissement de vitesse) tel que Kp = 1000, puis Kp = 5000.
Compléter le tableau
ci-dessous :
Validation vis-à-vis du cahier des charges
Question
7
Le
cahier des charges de l’asservissement en vitesse, afin d’obtenir
les performances souhaitées de la boucle collaborative est le
suivant :
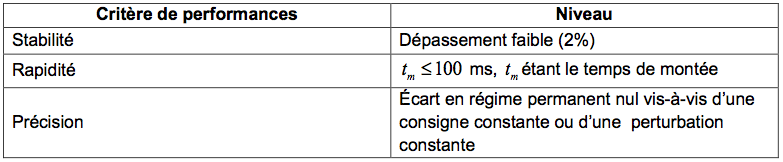
Conclure, au vu de vos expérimentations, sur
le respect du cahier des charges.
FIN DE CETTE PARTIE
Haut
de page