TP ASSERVISSEMENT ET CINEMATIQUE DU COMAX
Étude de l'asservissement en effort -
Activités des modélisateurs
L'objectif de cette partie est de valider
ce modèle par confrontation avec les résultats expérimentaux.
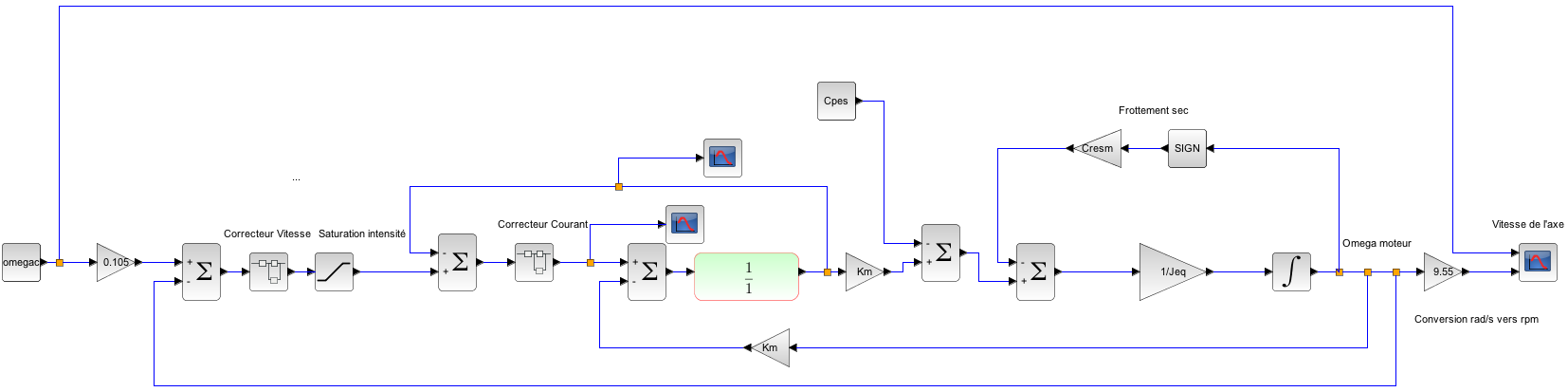
Un modèle causal sous Scilab vous est fourni : Asservissement
de vitesse.zcos.
Mise en situation
Le chef de projet a montré que le schéma bloc de l’asservissement de
vitesse se simplifiait sous
la forme suivante :

avec : Km : constante de couple ou de vitesse du moteur, avec Km=0,0302
Nm/A
Cv : coefficient de correction global de l'asservissement,
avec Cv(p)=0,06 A/(rad/s)
Jeq : inertie équivalente ramenée sur l'arbre moteur, inconnue
Cpes : couple dû à la pesanteur ramené sur l'arbre moteur,
avec Cpes=0,075 Nm
Cresm : couple dû aux frottements secs ramené sur l'arbre
moteur, avec Cresm=0,035 Nm
Détermination de l'inertie inconnue : aspect analytique
Question
1
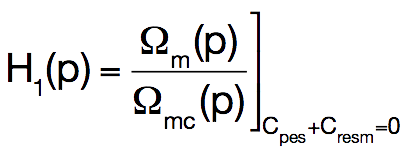
Établir l'expression d'une première
fonction de transfert, lorsque les perturbations sont nulles :
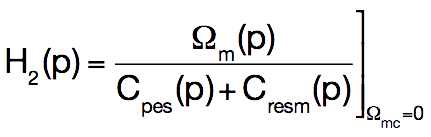
Établir l'expression
d'une seconde fonction de transfert, lorsque la consigne est nulle :
En appliquant le théorème de
superposition, déterminer l’expression de Ωm(p) en
fonction de ωmc(p) et de Cpes(p)+Cresm(p).
Question
2
Donner l'ordre et la classe de la
fonction de transfert.
Esquisser l'allure de la réponse indicielle de ce
système.
Donner l'expression de la constante de temps de
cette réponse indicielle.
En déduire alors puis réaliser un protocole expérimental
permettant de déterminer la valeur de l'inertie équivalente Jeq.
Détermination de l'inertie inconnue : aspect expérimental
Les expérimentateurs ont procédé aà deux expériences qui devraient
vous permettre de calculer l'inertie équivalente :
* une première avec consigne de vitesse égale à 3000 tr/mn
(mouvement vertical ascendant)
* une seconde avec consigne de vitesse
égale à -3000 tr/mn (mouvement vertical descendant)
Question
3
Ouvrir le logiciel "Comax IHM" et charger les fichiers
fournis par les expérimentateurs.
Valider ou infirmer le type de réponse indicielle que
vous aviez supposée à la question 2.
Mesurer l'erreur statique dans les deux
expérimentations. Justifier les différences observées.
Par le relevé de valeurs judicieuses sur les courbes obtenues, calculer
l'inertie équivalente du système.
Détermination de l'inertie inconnue : aspect simulation
Construction du modèle Scilab
L'objectif de cette partie est de comparer graphiquement les résultats
expérimentaux de la partie précédente avec le modèle correspondant au
schéma fonctionnel que vous avez élaboré.
Question
4
Ouvrir une fenêtre Xcos avec
Scilab.
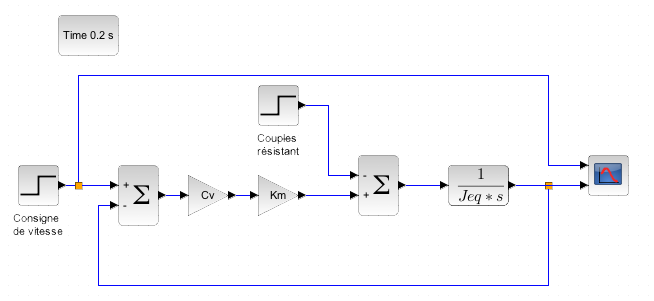
Modifier le contexte de simulation, et saisir le
nom des variables utilisées :
Cv=0.06
Km=0.0302
Jeq=(valeur de l'inertie que vous avez calculée)
Créer le modèle ci-dessous, et l'enregistrer.
Comparaison avec les fichiers de mesure expérimentale
Les expérimentateurs doivent vous fournir deux fichiers
.csv (Mesure1.csv et Mesure2.csv) qui contiennent les
valeurs expérimentales.
Vous allez les insérer dans votre modèle afin de comparer la
simulation avec les relevés réels.
Question
5
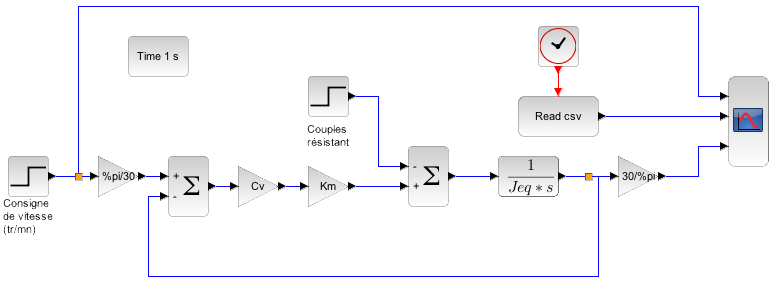 Insérer
un bloc "Read csv", que vous paramétrerez avec le nom d'un
fichier fourni par les expérimentateurs
Insérer
un bloc "Read csv", que vous paramétrerez avec le nom d'un
fichier fourni par les expérimentateurs
Insérer une horloge cadencée à 5 ms pour lire le
fichier
Insérer un scope à 3 entrées pour visualiser la
consigne et les 2 vitesses (mesurée et simulée)
Simuler le modèle, et affiner le début
des échelons de consigne de vitesse et de couplé résistant
pour que la réponse simulée débute au même moment que la réponse mesurée
:
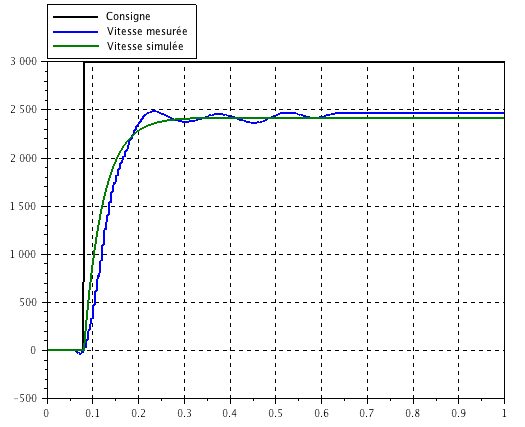
Votre modèle est-il réaliste ?
En présence d'écarts, quelles pourraient en être
les causes ?
Reconfigurez votre modèle afin d'obtenir une courbe la plus fidèle
possible, si possible, aux résultats expérimentaux
FIN DE CETTE PARTIE
Haut
de page