 La
société PELLENC développe robots destinés à la cueillette de fruits ou au
tri de déchets. Ces robots identifient par une caméra les éléments à
prélever.
La
société PELLENC développe robots destinés à la cueillette de fruits ou au
tri de déchets. Ces robots identifient par une caméra les éléments à
prélever. 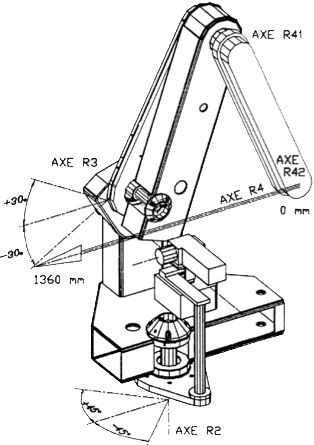 Les
axes R2 et R3 définissent les angles de visée qui permettent de pointer la
direction fournie par la caméra. Les angles de visée sont :
Les
axes R2 et R3 définissent les angles de visée qui permettent de pointer la
direction fournie par la caméra. Les angles de visée sont :
Un compte-rendu doit être établi et expédié via le
site. Le pdf du
compte-rendu à compléter
est téléchargeable.