TP ASSERVISSEMENT ET CINEMATIQUE DU MAXPID
Modélisation
de l'asservissement - Activités des
expérimentateurs
L'objectif de cette partie est de vous faire manipuler le système
Maxpid dans différentes configurations afin d'étudier l'influence de la
gravité et des masses embarquées sur les performances du système.
Vous aurez également à identifier les caractéristiques de
l'asservissement.
Les modélisateurs vous demanderont enfin de réaliser quelques
expérimentations afin de valider leur modèle causal.
La mise en œuvre du Maxpid est décrite dans le document ressource Notice
et performances.pdf
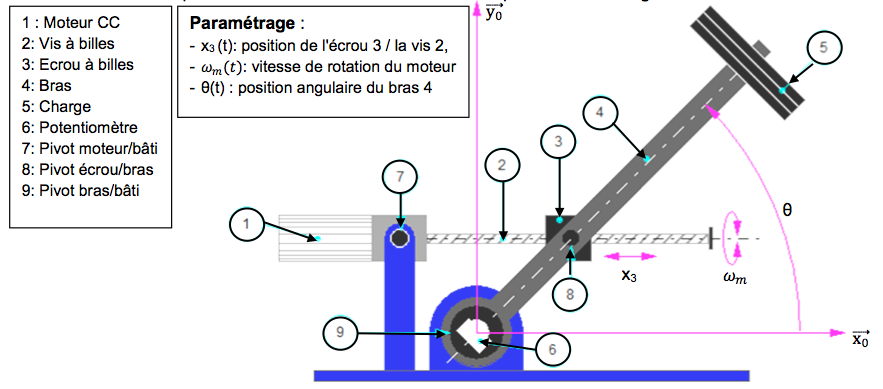
Structure
du Maxpid
Le système est constitué de différents éléments
représentés ci-dessous :
Performance
de l'asservissement
Question
1
Mettre en service le bras Maxpid.
Paramétrer l'asservissement avec Kp=150, Ki=0,
Kd=0, Facteur de commande=2.
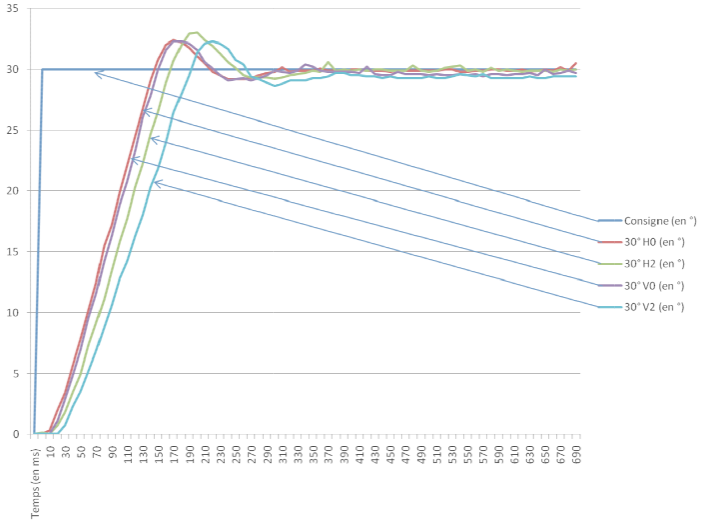
Procéder aux expérimentations suivantes avec des
échelons de 30°, en partant de la valeur 10° afin d'éviter que le bras
vienne frapper l'amortisseur en fin de course
(n'afficher que les courbes de consigne et de position) :
* Maxpid vertical sans masses embarquées
* Maxpid
vertical avec 2 masses embarquées placées à
250mm de l'axe
* Maxpid horizontal sans masses embarquées
* Maxpid
horizontal avec 2 masses embarquées placées
à 250mm de l'axe
Enregistrer chacune de ces mesures.
Vous devez observez les allures
globales suivantes des courbes :
Question
2
En
utilisant le relevé expérimental pour le Maxpid vertical avec 2
masses, identifier par lecture sur la courbe :
* sur la courbe, le régime transitoire et le régime
permanent
* le gain de la fonction de transfert
* le temps de réponse tr5%
* le 1er dépassement relatif D1%
* la précision statique εs.
Question
3
En
déduire, à l'aide des abaques, :
* la valeurs du coefficient d'amortissement à l'aide du
1er dépassement relatif,
* la valeur de la pulsation propre du système à l'aide du
temps de montée.
Ecrire la valeur numérique de la fonction de
transfert correspondante, sous sa forme canonique.
Vérifier à l'aide de l'abaque du temps de
réponse réduit la valeur du temps de réponde tr5% mesuré.
Influence
des perturbations
Le passage du mode horizontal au mode vertical ajoute la perturbation
du poids sur la masse embarquée.
Question
4
Justifier que
les courbes 30°H0 et 30°V0 soient presque identiques.
Quels sont les variations de performances entre
l'essai 30°H0 et 30°H2 ? Ces variations peuvent-elles s'expliquer au vu
des changements de paramètres entre ces 2 essais ?
Quels sont les variations de performances entre
l'essai 30°H2 et 30°V2 ? Ces variations peuvent-elles s'expliquer au vu
des changements de paramètres entre ces 2 essais ?
FIN DE CETTE PARTIE
Haut de page