L'objectif de cette partie est de vous faire :
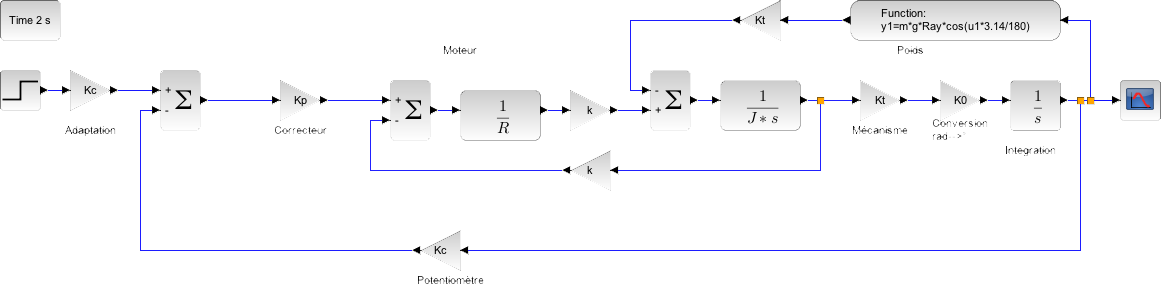
* modéliser l'asservissement
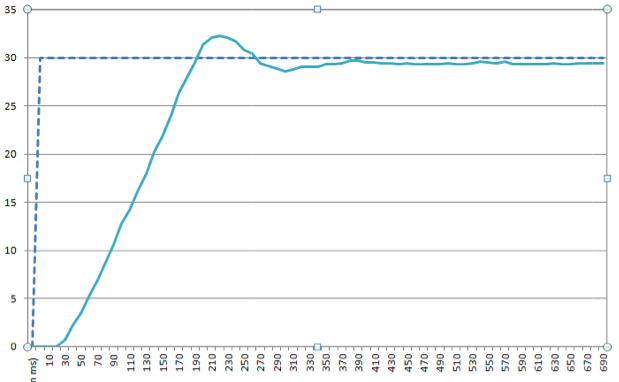
* identifier l'ordre et les paramètres caractéristiques de cet
asservissement par analyse de sa réponse indicielle
Répartition des tâches
Le chef de projet devra mettre en œuvre la démarche d'identification
du système, pour 2 réponses indicielles. Puis il aura à choisir un
coefficient de correction proportionnelle en
fonction d'un critère imposé.
Les expérimentateurs mèneront plusieurs expérimentations afin de
déterminer l'ordre du système asservi, et déterminer la fonction de
transfert en boucle fermée.
Ils mettront également en évidence l'influence de la gravité et des
masses sur la réponse du système à une consigne en échelon.
Les modélisateurs auront en charge la modélisation de l'asservissement
par schéma bloc et de mettre en œuvre sa simulation.