TP ASSERVISSEMENT ET CINEMATIQUE DU MAXPID
Modélisation
de l'asservissement - Activités des
modélisateurs
L'objectif de cette partie est de vous faire modéliser le système
Maxpid sous forme de schéma bloc à a partir du modèle de connaissance.
Ce schéma fonctionnel sera ensuite traduit sous forme de modèle causal
sous Scilab, que vous simulerez.
Enfin, après avoir demandé aux expérimentateurs une série de mesures,
il faudra valider votre modélisation
Structure
du Maxpid
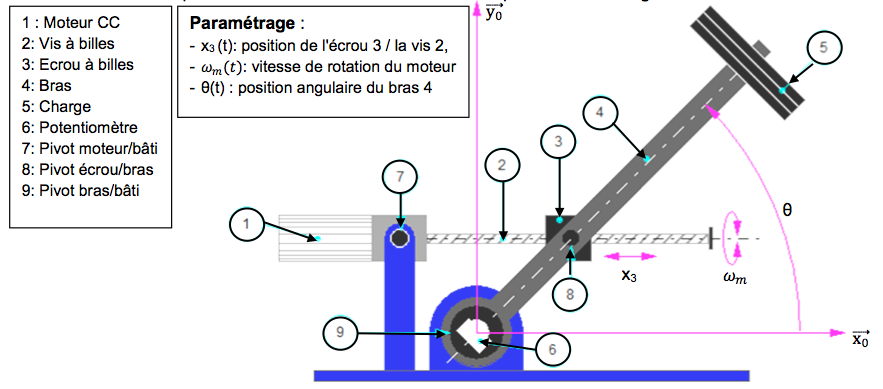
Le système est constitué de différents éléments
représentés ci-dessous :
Schéma
bloc du Maxpid
L'ensemble du schéma fonctionnel est complexe, et nécessite de le
décomposer en deux parties :
* une partie "asservissement"
* une partie "système"
Nous étudierons en détail dans cette partie la partie
"asservissement".
Schéma bloc de l'asservissement
Question
1
Compléter le schéma
bloc de l'asservissement ci-dessous, en indiquant en dessous des
blocs les composants qui assurent les fonctions :
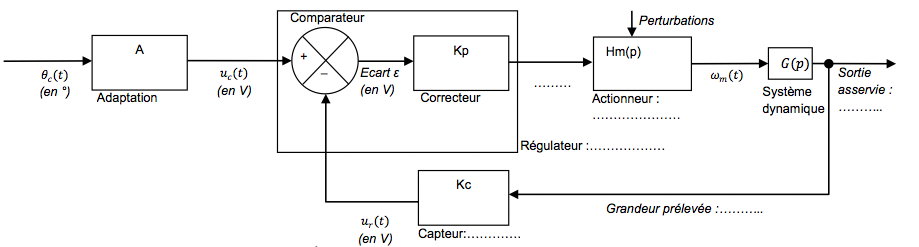
Indiquer, en dessous des traits entre blocs, les
grandeurs potentielles manquantes par la lettre usuelle.
Inscrire en rouge au-dessus des traits les
grandeurs potentielles dans le domaine de Laplace.
Fonction de transfert de mesure Kc
La chaîne de retour est assurée par un potentiomètre qui
délivre une tension ur(t) proportionnelle à l'angle
θ(t).
Les mesures fournissent :
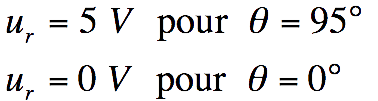
Question
2
En déduire
l'expression du coefficient Kc, et sa valeur numérique en V/°.
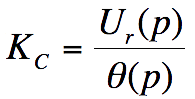
Montrer que dans le domaine symbolique la fonction
de transfert s'écrit :
Fonction de transfert d'adaptation A
La consigne est une valeur en °, mais doit être comparée
à une tension issue du capteur précédemment étudié. Il faut donc
adapter la consigne (en °) en une valeur de tension (en V) de façon à
pouvoir mesurer un écart entre consigne et mesure : c'est le rôle de la
fonction de transfert d'adaptation A.
Question
3
Donner
la relation entre A et Kc pour que l'écart ε soit effectivement l'image
de l'écart entre la sortie θ et la consigne θc
Fonction de transfert de la motorisation
Les frottements visqueux seront négligés dans l'étude.
Question
3
Prendre connaissance du modèle de connaissance du
Maxpid.
Ecrire ces équations dans le domaine symbolique
de Laplace.
Question
4
Question
5
En supposant le couple résistant nul,
déterminer la fonction de transfert du moteur à écrire
sous forme canonique :
Donner l'ordre et la classe de cette fonction de
transfert.
Fonction de transfert du système
Question
6
Déterminer enfin la fonction de
transfert du système dynamique sous forme canonique :
Donner l'ordre
et la classe de cette fonction de transfert.
Modélisation
causale du Maxpid
Simulation sans perturbation
Question
7
Ouvrir dans Scilab le fichier Maxpid.zcos.
Par un clic droit dans la fenêtre graphique du schéma bloc,
sélectionner "Modifier le contexte" afin de vérifier que
les différentes valeurs correspondent aux valeurs attendues.
Vérifier par ailleurs que ce schéma bloc
correspond bien au schéma bloc que vous avez défini dans la partie
précédente.
Lancer l'étude et observer la
réponse temporelle.
Vérifier qu'elle correspond à la réponse
attendue. Justifier votre réponse.
Ne pas fermer le scope afin de pouvoir comparer cette simulation
avec les simulations suivantes.
Question
8
Effectuer l'étude en doublant
l'inertie J. En déduire l'impact de la masse sur les performances du
système.
Justifier l'impact sur la stabilité.
Influence d'une perturbation
Question
9
Ouvrir à présent le modèle Maxpid
avec poids.zcos. Les
paramètres sont les mêmes que ceux de la partie analytique.
Observer l'impact du poids sur la réponse dans le
cas d'un échelon positif ou dans le cas d'un échelon négatif.
Justifier l'allure l'évolution des réponses.
FIN DE CETTE PARTIE
Haut de page
