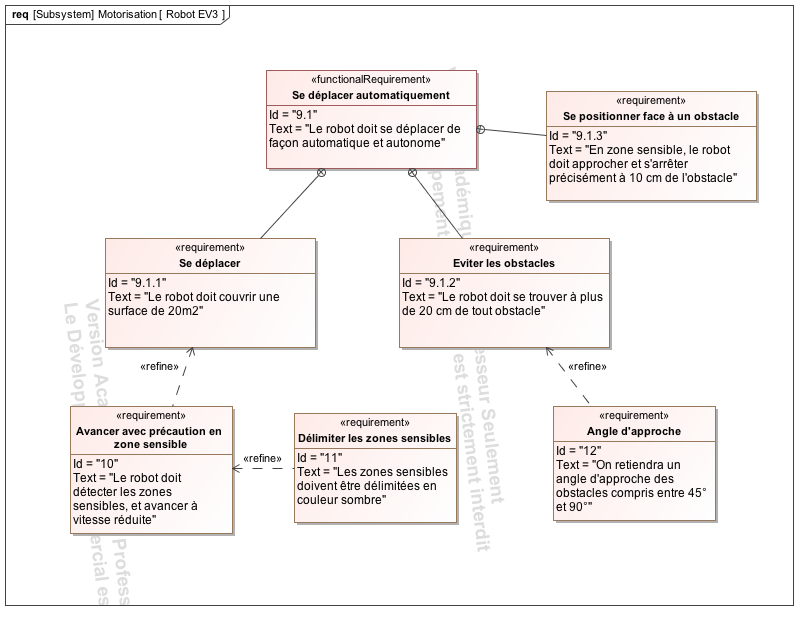
Vous vous intéresserez dans la suite de ce TP à cet
extrait du diagramme des exigences du déplacement du robot EV3 :
La première analyse comportementale s'intéresse à l'exigence Id="9.1.2",
ainsi que l'exigence Id="12" qui la raffine.
Nous résumerons ces exigences par : "Le robot avance jusqu'à ce
que le capteur soit à moins de 20 cm, en prenant un angle d'approche
de 45°. Le robot doit alors s'arrêter."
Le Chef de projet aura en charge l'élaboration de l'algorigramme de ce
comportement.
Les modélisateurs devront achever le diagramme d'état de ce
comportement.
Les réalisateurs implanteront ce diagramme d'état et valideront le
comportement réel.