TP ANALYSE FONCTIONNELLE ET COMPORTEMENTALE DU ROBOT
EXPLORATEUR
B.3.2 : 1ère analyse comportementale - Activités des modélisateurs
Simulation du diagramme d 'état
Le comportement du robot d'exploration EV3 sera décrit
par diagramme d'état.
Ce diagramme d'état sera inclus dans un modèle Matlab :

Télécharger
le modèle TP_CY1_EV3_1_etudiant.slx
et l'ouvrir dans Matlab.
Question
1
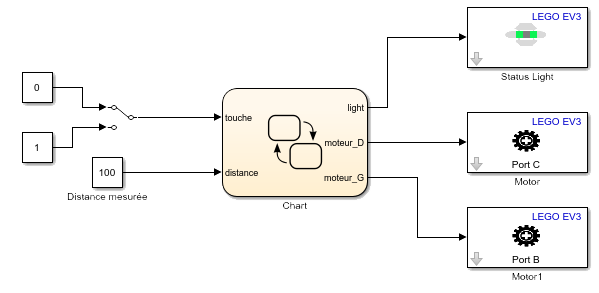
Ce modèle est un modèle de simulation :
* le capteur tactile sera remplacé par un switch,
* le capteur à ultrasons sera remplacé par une distance à
saisir manuellement.
Compléter le diagramme ébauché en
installant les objets de la bibliothèque
"Simulink" (variables et switch).
Question
2
Développer
le diagramme d'état en double-cliquant dessus. Vous pouvez
maintenant visualiser l'ébauche de celui-ci.
Initialement,
l'état actif positionne les consignes moteur à 0. La mise en route
du robot est prévue par action sur le capteur tactile.
A la lecture du diagramme d'état, préciser
si le robot se met en action en appuyant sur le capteur tactile,
ou le relâchant.

Ce diagramme d'état est incomplet. Il manque :
* 2 transitions qui traduisent les conditions de
distance,
* les actions associées à l'état "avance" qui
traduisent les consignes moteur.
Le chef de Projet doit être en mesure de vous
donner la valeur de la distance à paramétrer.
Question
3
Compléter le diagramme avec les transitions
manquantes, et les consignes moteur manquantes (à positionner sur
une valeur égale à 100).
Simuler le fonctionnement et valider son
comportement, en actionnant le switch et en saisissant différentes
valeurs de distance.
Mise à jour du diagramme d 'état
Le switch et la saisie de distance doivent maintenant
être remplacés par la véritable acquisition issue des capteurs du robot
EV3, afin de créer un diagramme d'état qui puisse être transféré dans le
contrôleur EV3 du robot.
Question
4
Les expérimentateurs doivent vous fournir le numéro de port
des deux capteurs (tactile et ultrasons).
Compléter le modèle en insérant les deux
capteurs en question, et en les connectant aux entrées du
diagramme d'état. Ces blocs capteurs sont accessibles dans
l'explorateur de bibliothèque, dans la partie "Simulink Support
for LEGO EV3".
Enregistrer votre fichier.
FIN DE CETTE PARTIE
Haut de page